由驾驶任务进阶至道路交通工程设计:直线路段情景之驾驶情节任务分析
主讲人:徐耀赐教授
日期:2021年8月22日
讲座专家介绍:徐耀赐,博士、教授。1979年毕业于台湾中央大学土木工程系,1989年取得美国马里兰大学土木工程博士学位。曾任职美国马里兰大学桥梁工程中心、美国康州工程顾问公司,长期从事道路、交通工程规划与设计,是美国注册之土木工程技师(PE)。1999年,入选世界土木工程名人录。
报告整理:叶采阳、王雪松;审核:徐耀赐
会议截屏:
1. 直线段驾驶任务分析与车道宽设计
1.1. 直线路段驾驶情节与任务分析
从文献角度讲,直线路段相比于弯道等更复杂的道路路段看似没有很多需要注意的地方,人们常下意识认为直线路段的事故量相对更少。但徐老师指出,若从驾驶情节与任务分析的角度对直线路段的设计进行重新思考,其中的细节并不比其他复杂路段少,直线路段的设计不当可能会导致更严重的事故。
(1)直线段道路特点
首先对直线路段的定义进行明确。由于在角度较小时曲线弧长与弦长可以近似相等,因此道路路段曲度小于3度的皆可视作直线路段,且直线路段可能只占道路总长的一小部分。
其次,讨论直线路段还需要考虑不同车道数的情况。受经济实力与交通需求的影响,就高速公路而言世界上占比最多的车道是三车道与四车道道路(图 1),在接近多都市的区域可能出现五车道、六车道的道路,而在经济欠发达国家与地区,如越南,其高速公路分布则更多的是两车道道路。
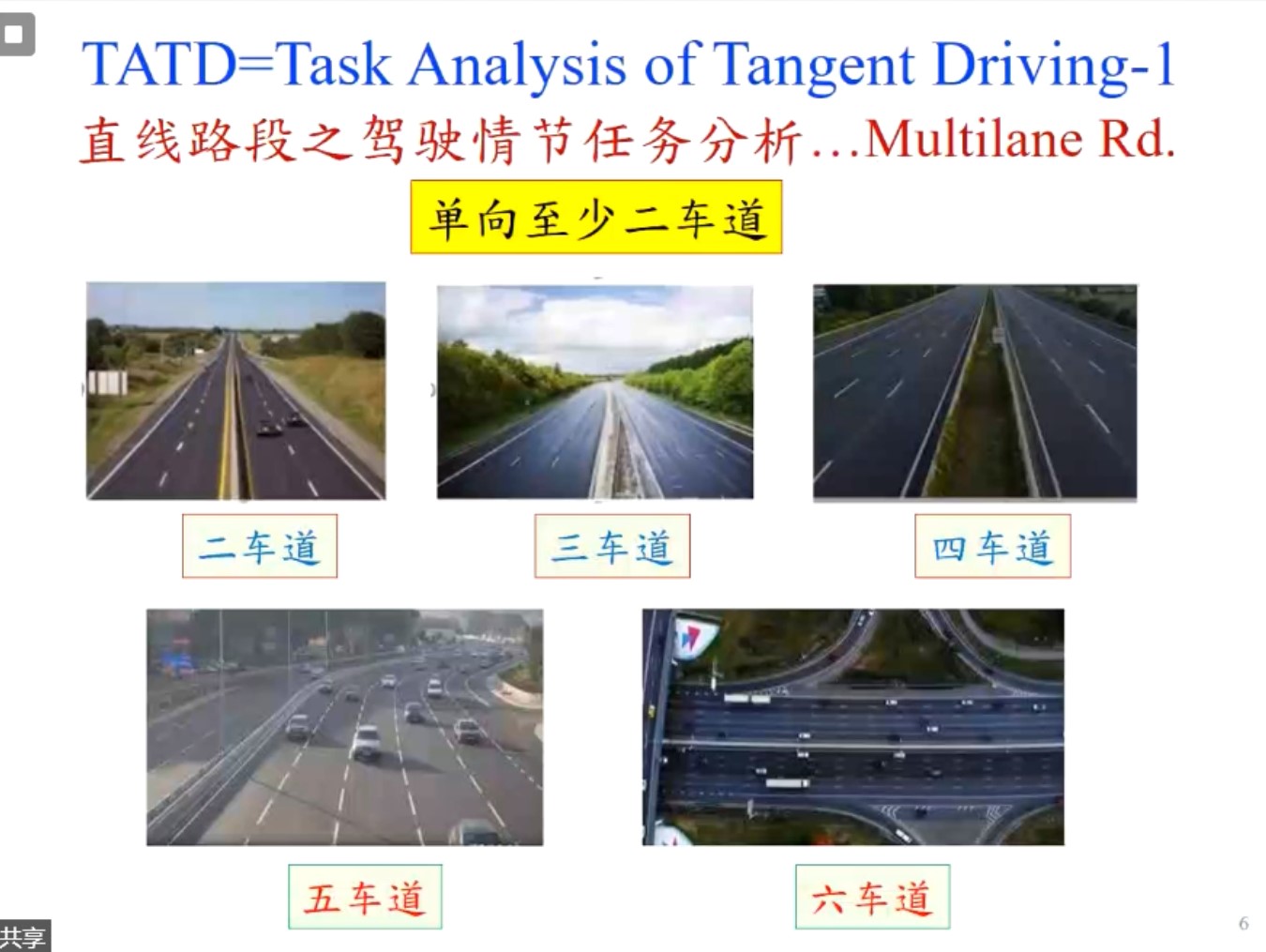
图 1 不同车道道路示意图
除开高速公路,在乡村地区则常能见到双向双车道道路、单车道道路、桥梁等路段。如此众多道路车道数差异,造成道路设计中的巨大不同。在徐老师多年的实践经验中,不同车道数带来的道路设计上考虑的重点因素的差异可以达到63点之多。例如,在单向车道的条件下,双车道需要考虑超车视距的问题,而如果车道扩展为了四车道,则还需要考虑如何保证车辆安全、平顺地从最内侧车道变换至最外侧车道等其他难题。
(2)道路轮廓对驾驶任务的影响
从驾驶任务到道路设计,道路设计者与道路驾驶人的观念越相符合越好。从普通大众的角度,道路线形、缓和曲线、超高等专业概念是十分陌生的。因此,需要设计者站在大众的角度进行思考与设计,如何通过简单的设计实现引导的作用。
在驾驶人的出行过程中,其眼前所视标线构成了路段的短范围轮廓,视距范围内标线则构成了道路路段的长范围轮廓,这也恰好对应了驾驶任务中“控制”的概念——通过标线等对驾驶人进行诱导,在特定的路段上调控车辆速度、驾驶人心理等方面,保障安全的出行。因此,道路轮廓应避免造成驾驶人的误判,尤其是纵向视觉诱导(图 2)。
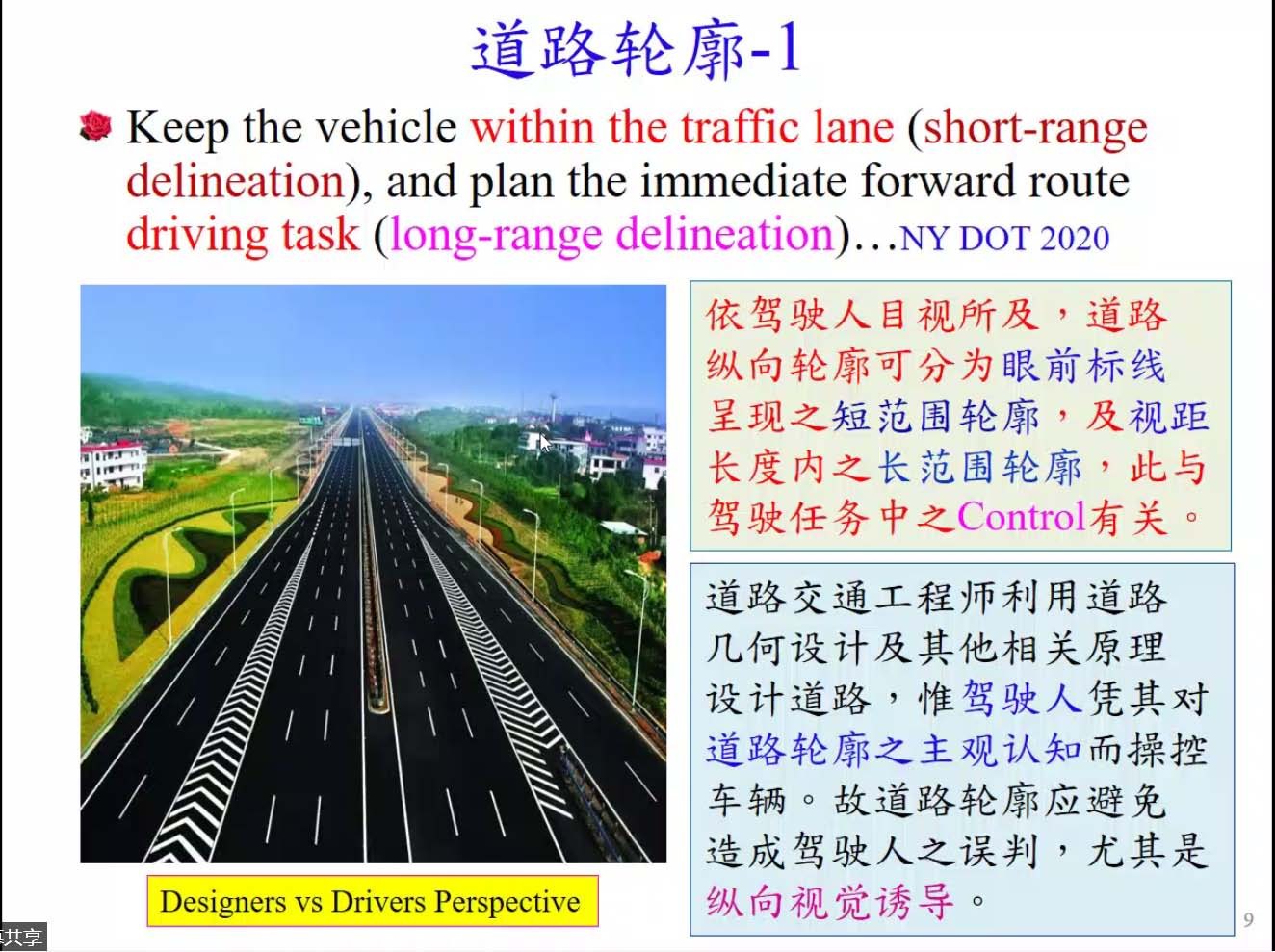
图 2 道路轮廓设计重要性
此外,不良的道路组合线形会极大地伤害驾驶人对道路轮廓的识认性,形成Geometric Dilemma,进而衍生出Driving Dilemma,对驾驶任务的完成产生消极影响,甚至带来严重伤害。以图 3所示的事故多发路段为例,两处路段中驾驶人在道路坡顶之前均无法判断后续道路线形变化,造成危险。

图 3 不良道路几何线形导致事故多发路段示例
(3)驾驶情节与驾驶任务的相关性
徐老师总结了驾驶任务对驾驶情节影响的五个关键点,包含了道路的位阶、车道、服务水平、道路设施、以及道路衔接中车辆的速差效应(图 4)。道路设计者需要预先考虑道路上可能发生的事故场景,并根据交通问题处理的需要进行道路设计,只有道路设计者从驾驶任务的方面进行细致的考虑,才能保障驾驶人能够简单高效的执行驾驶任务。例如,为满足高速公路紧急事件处理的需求,于是就有了高速公路硬路肩的设计,这样也是遵循Forgiven Design的理念。
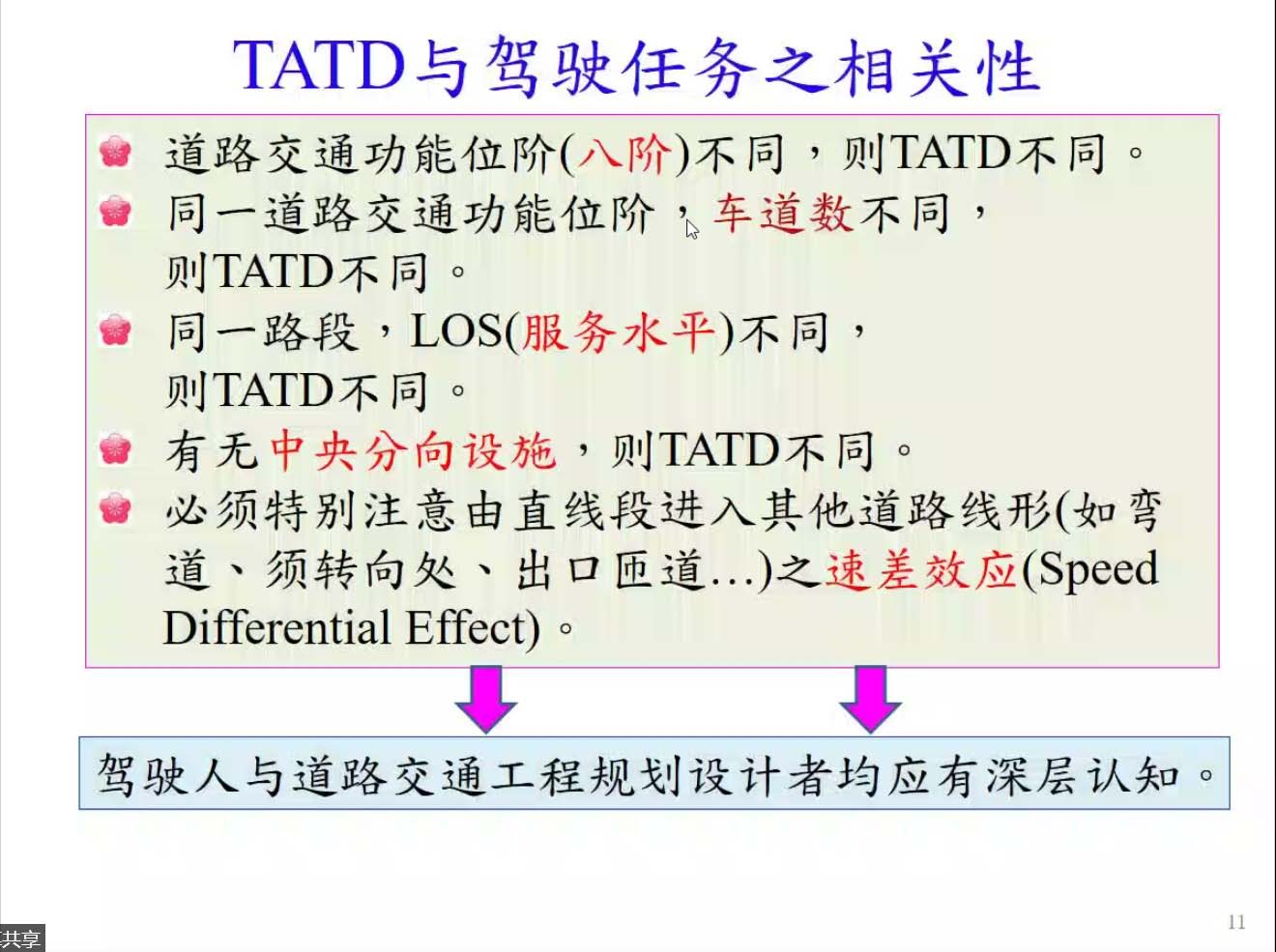
图 4 驾驶情节与驾驶任务相关要点
(4)直线路段驾驶任务与设计细节考虑
直线段驾驶任务分为Control、Guidance、Navigation三大类,从驾驶人操控车辆、车辆间的交互、车辆与道路设施的交互出发,对各项驾驶任务的细节进行梳理(图 5)。以驾驶任务分析为基础,即可衍生出各项道路设计细节,包括了车道宽、标线尺寸、标线排列、标志设计、标志悬挂、反光设施等各个方面,从而辅助道路设计者全面地、合理地设计与驾驶任务相符合的道路。

图 5 直线段驾驶任务分类
1.2. 决定车道宽度的重要考虑因素
(1)车道宽的相关因素
车道宽度的相关因素包含了其位阶(8-Level Theory)、车辆种类、自由流速度、侧向净距、水平线形、路面材料等(图 6),这六大类因素共同决定了道路的安全性与容量,并对不同的驾驶任务产生影响。但徐老师同时也提醒到,在讨论这些因素对车道宽的影响时,不包含狭路与低流量道路,这两类道路在车辆运行时都没有通行能力的概念,也无法衡量其服务水平,其宽度需要另外考虑。

图 6 道路宽度影响因素
(2)区域路网配置与车道宽
此外,一个完整区域的路网车道配置包括了路段车道配置、交叉口车道配置,以及交流道车道配置共三大类车道配置(图 7)。但这三类配置中的车道的数量、车道的宽度、甚至是不同的车道等级均不相同,彼此之间必然需要通过渐变设计对车道数、车道宽度进行渐变调整,即需要保证相连的两条道路满足位阶相邻,避免出现相连、相交道路车流、车速差距过大的情况。除此之外,区域路网配置还需与城市规划、土地利用划分等一起思考,从整个路网的高度合理设计车道宽度。

图 7 区域路网车道配置
(3)车道宽理论与驾驶任务
运用上述车道宽理论的前提包含多个方面的理想条件,包括直线路段、平坡路段、无视距视区遮挡、道路交通状况正常。而在其他情况下,则需要针对性的对道路宽度进行进一步的修正,包括但不限于曲线段加宽、侧向净距考虑等条件。总的来说,道路宽度是一个系统性问题,其设置、位阶、不同的驾驶任务等都会对其应用产生影响。因此,进行道路宽度设置时需要具有充分的系统性思维,从系统的角度解决问题(图 8)。
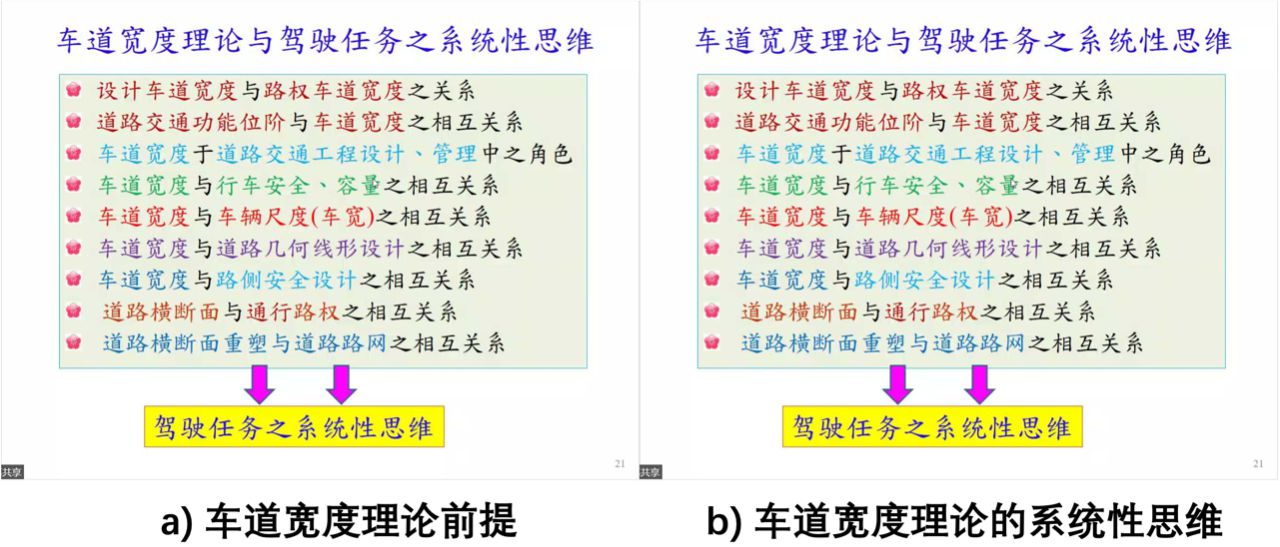
图 8 车道宽度理论与驾驶任务关系
(4)车道宽类型
根据宽度的不同,车道宽可分为基本车道宽、设计车道宽、实际可用车道宽。其中基本车道宽为3m,该宽度是由大货车宽2.5m加上左右侧向净距各0.25m决定的。之所以需要增加侧向净距,首先这是因为车辆在实际运行中并不总是保持在车道正中央,而是会产生一定的波动;其次车辆的运行具有Shy Away Effect,即当车道附近出现了障碍物或其他车辆,车辆往往会向另一侧产生偏移的效应。因此,道路宽度设计应当以3m为基准,根据实际道路上的交通需求进行适当的增减,速度越高所需要的侧向净距也越大。
对于设计车道宽与实际车道宽,实际车道宽是真正的路权宽度,而设计车道宽在规划设计时所严格规定的车道宽度。在实际的场景中,设计车道宽度要大于实际车道宽。
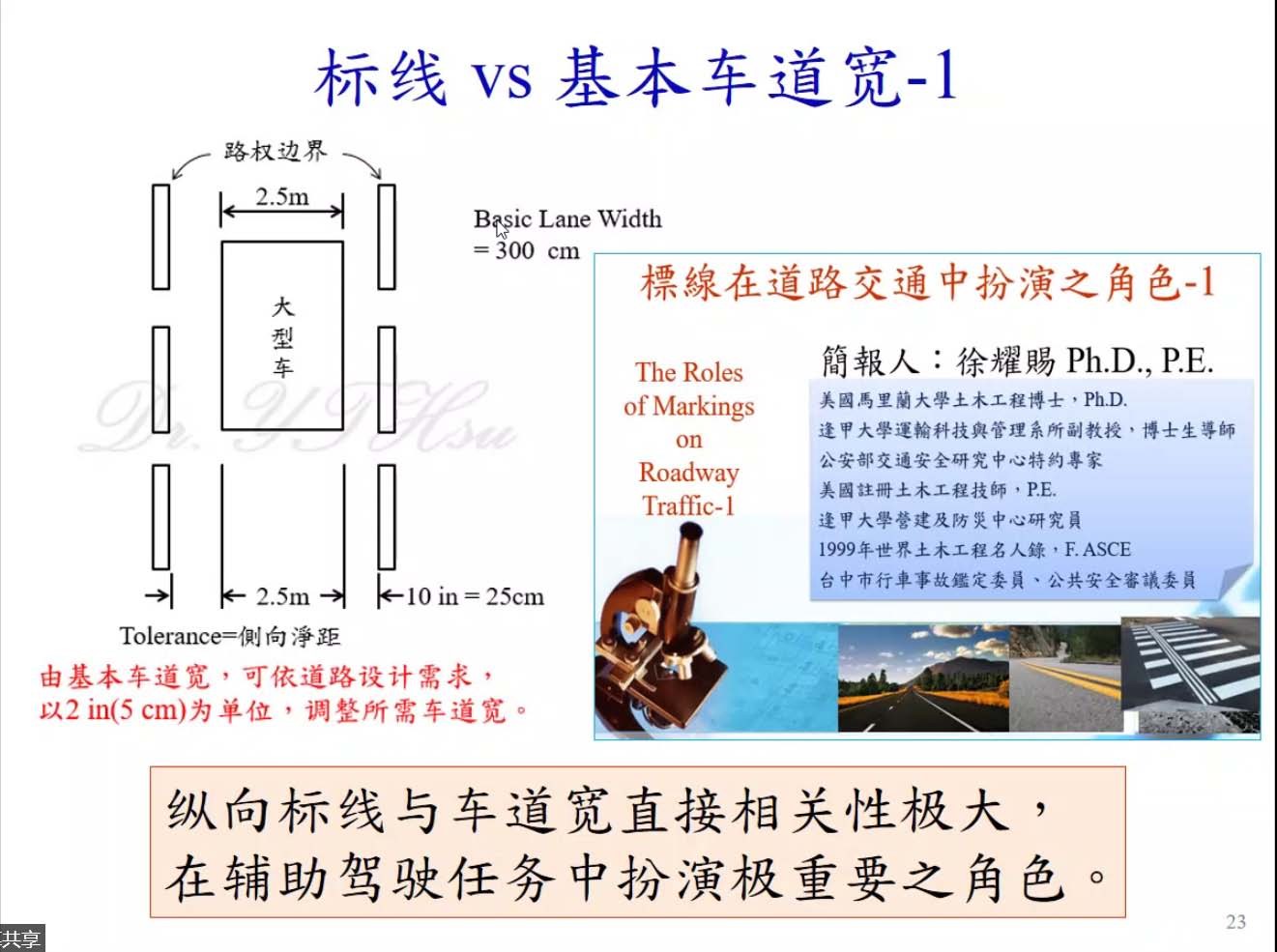
图 9 基本车道宽
(5)车道宽与设计需求的关系
根据AASHTO的Green Book 2018,车道宽的决定与驾驶任务息息相关,对车道宽度进行不同程度的调整还能够对驾驶任务起到不同的控制作用。从人因的角度讲,车道宽度的减小能够使车辆保持更低的速度。从驾驶任务的角度讲,当道路所处的位阶已经确定,其车道宽度的范围也因而基本确定。因此,不同的车道宽度对应不同的驾驶任务需求,通过对车道宽度进行调整,进而可以实现对驾驶人,以及其他交通参与者的行为的调节。在上述考虑的作用下,Green Book 2018中对不同功能、定位的道路均进行了对应的图 10的车道宽度建议,这些数据是约六千万美元的资金投入。
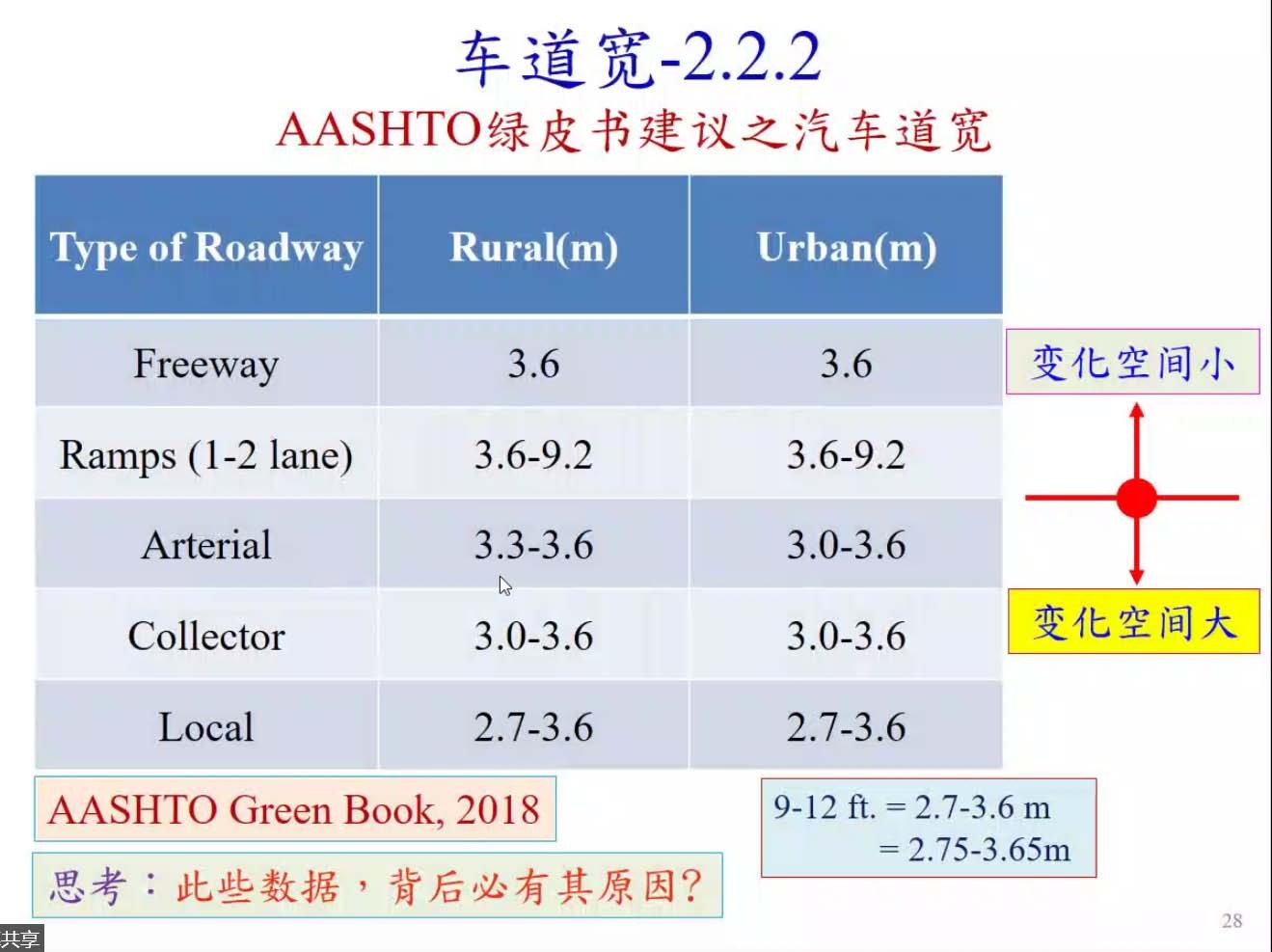
图 10 Green Book 2018建议车道宽
根据这些建议数据,可以发现国内的道路设计存在着巨大的可调整的空间,而这就从车道宽度的设计衍生出了城市道路断面的重塑问题。对车道宽度的调整一方面会对车辆的通行本身起到速度控制的作用,另一方面宽度的改变会极大地影响各类道路基础设施的排布。若对车道宽度进行缩小,则在路权范围不变的前提下车道数目将可以适度增加,此外非机动车道、隔离设施、分向设施、停车设施等道路基础设施也可以有足够的空间进行排布,改善出行体验、提高出行安全。
以美国西雅图为例(图 11),缩小车道宽度之后增加了非机动车设施,使道路设计更加契合人本交通的理念。

图 11 断面重塑案例
(6)车道宽度与事故率的关系
在车道宽度的设计中,并非车道越宽越好。在各项研究中已经证实,随着车道宽度的增加,对应的事故率呈现先降后升的趋势,得出对城市道路而言,最好的车道宽位于3.2m – 3.3m之间(图 12)。因此,从这个角度讲国内城市道路车道宽度普遍偏大。这就又回到了城市道路横断面的重塑问题,即通过限制车道的宽度,为交通控制、道路基础设施改善提供便利。
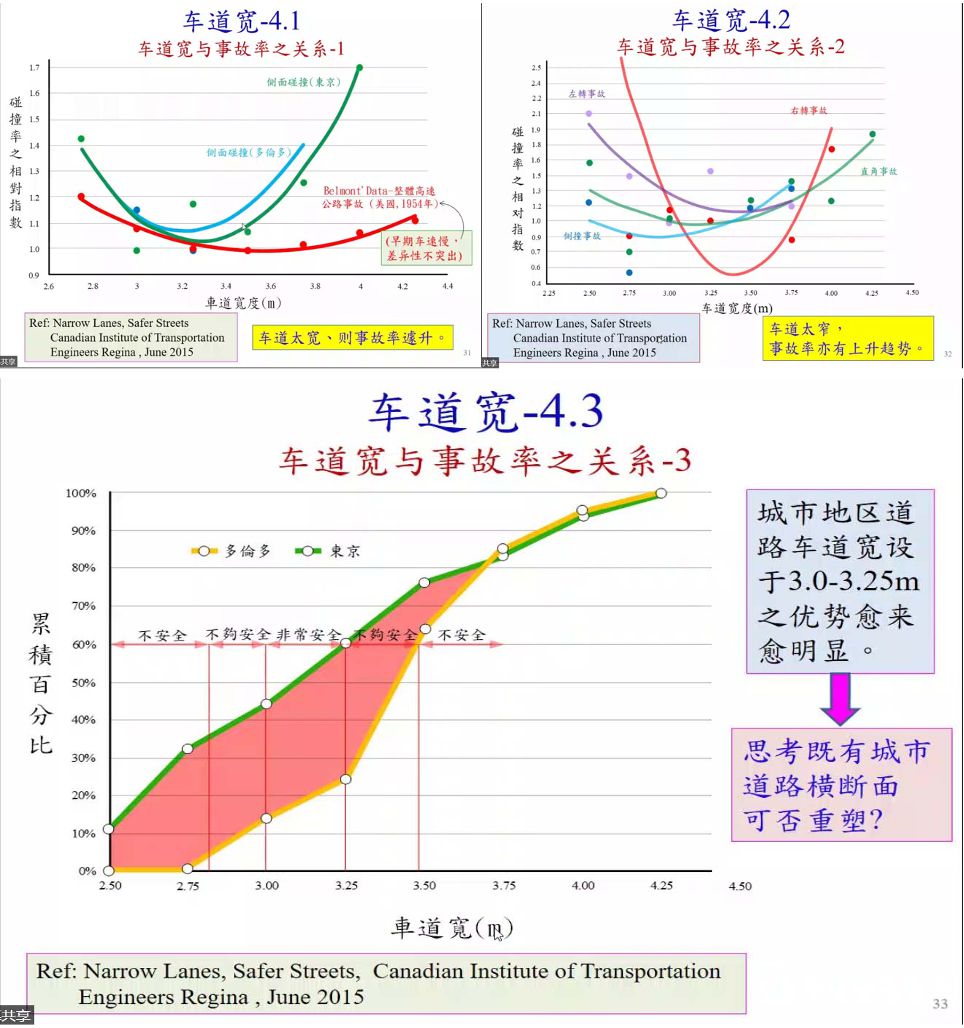
图 12 车道宽度与安全性关系
2. 交通工程中的视觉需求
“视觉”在直线路段的驾驶情节分析中,关系到七大方面,其中以标志、标线、几何线形、路侧设施四类最为重要(图 13)。

图 13 交通工程中与“视觉”相关要素
2.1. 视觉参照物作用
(1)标线与视觉参照物
在直线段驾驶任务中,纵向标线是极为重要的视觉参照物,具有路权指派与通行权边界指引的内涵。除了纵向标线以外,不同类型的标线具有不同的指示意义,分别对应着车辆行驶中不同的驾驶任务。因此在进行标线的设计时,必须注意其可明视性、断续合理性。
以桥梁为例,需充分考虑桥梁伸缩缝的影响,伸缩缝附近的标线其长度需灵活进行调整,减少伸缩缝对标线断续合理性的影响。以狭路为例,当夜间行驶时,标线几乎是道路的唯一参考,当道路边界条件不好时,则需以边线绘制作参考,避免车辆驶出道路造成危险。

图 14 不同出行环境下标线的不同设置要求
(2)视距、视区对驾驶任务的影响
视区代表驾驶人前方的可视范围,视区越窄驾驶任务的困难程度越大。在日常生活中所谓的“视区”所描述的概念则多指UFOV(Useful Field Of Vision),即驾驶人真正有用的视区中的一部分,普通驾驶人的UFOV的主体范围是驾驶人眼前实现3-10度之内的区域。因此,对于每一条道路需要仔细校核其UFOV,避免道路附近的基础设施、树木绿化等条件对UFOV起到遮挡作用。
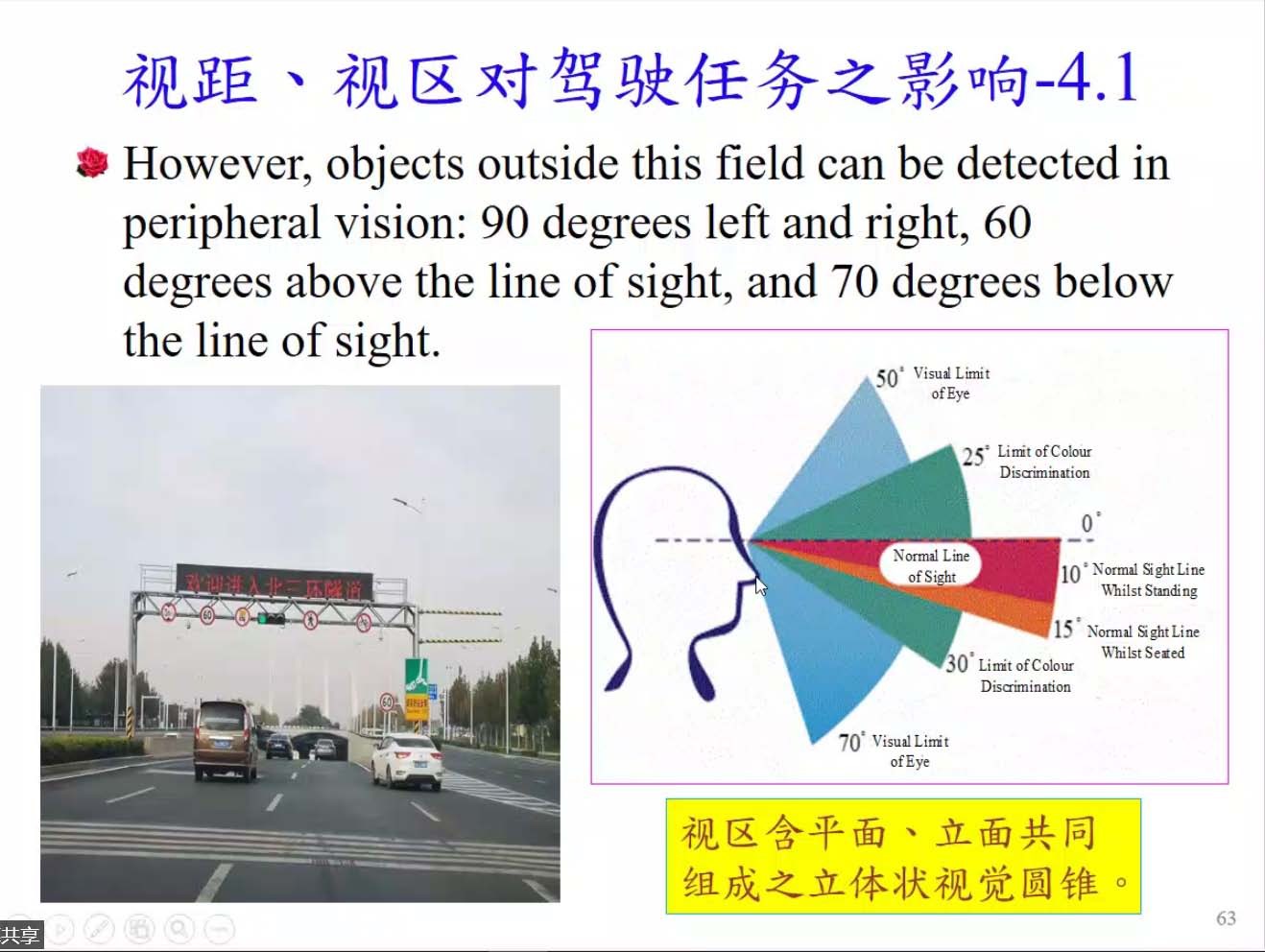
图 15 驾驶人视区角度
(3)标志的视认
从视觉角度,标志的设计包括视认与识认两个方面。其中,视认代表驾驶人意识到标志的存在并初步判断标志的类别,对应驾驶人从离标志较远的地方发觉标志的存在并初步做出反应。这种情况下,标志的底色设置尤为关键,这是保障驾驶人及时发现并做出初步判断的基础。不同于视认只需要粗略了解标志的类别,识认则意味着驾驶人对标志内容的认读,是较近距离条件下驾驶人对标志详细内容的识别,需要驾驶员明确做出对应的反应。
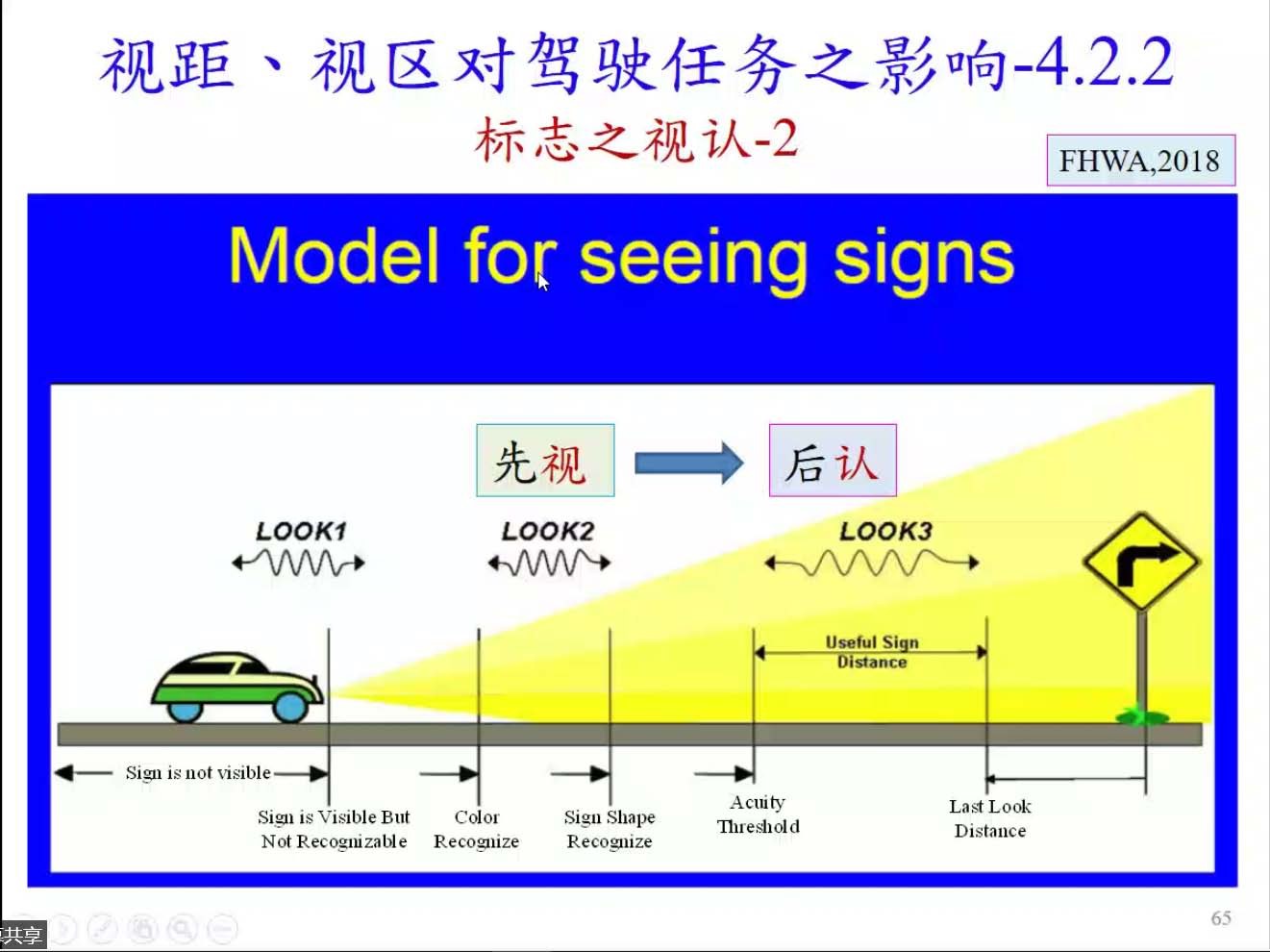
图 16 标志的“视认”与“识认”距离示意
此外,标志的设置需要为驾驶人预留足够的PRT,,从而直接关系到驾驶隐患的产生与发展(图 17)。
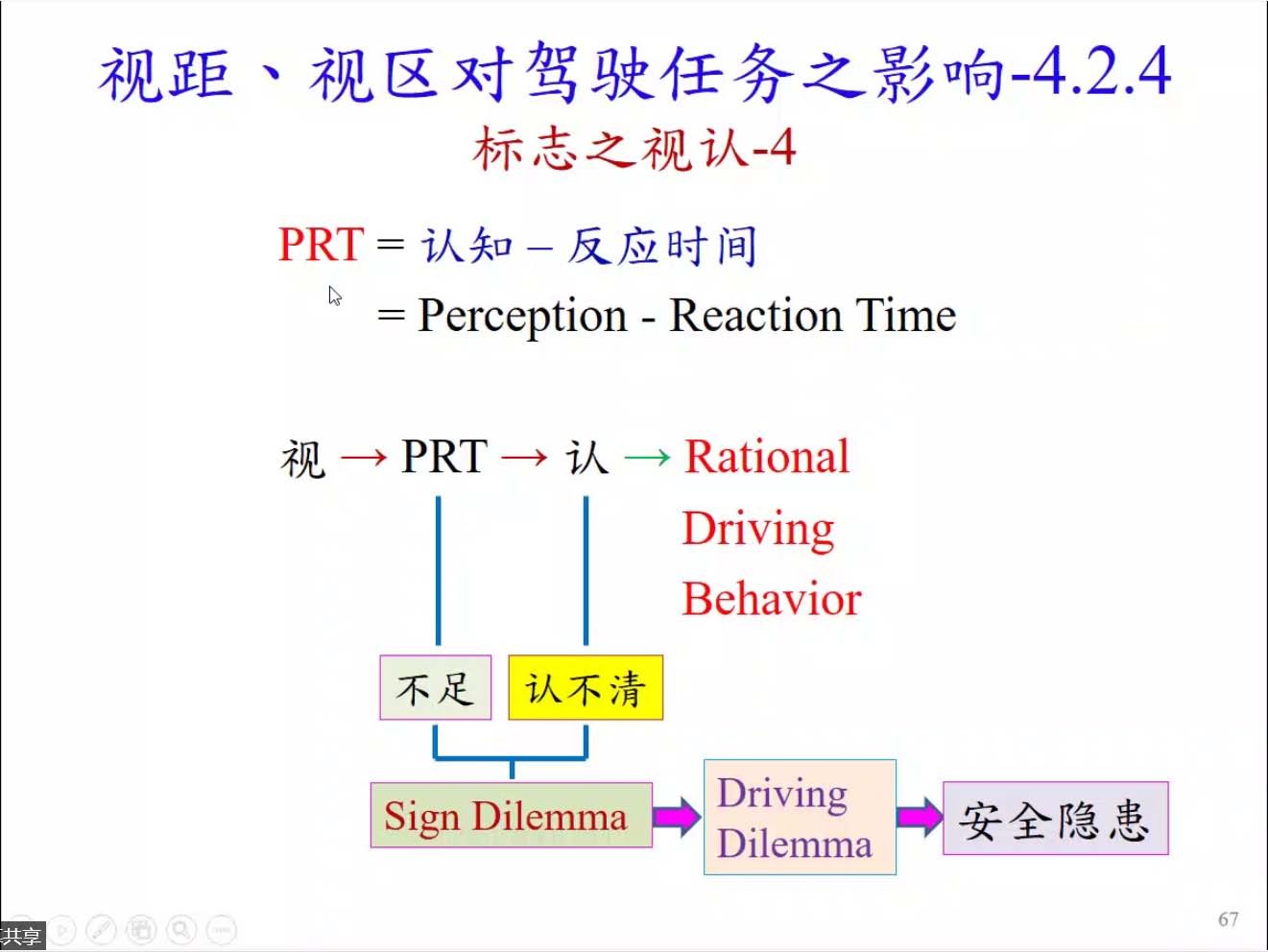
图 17 标志设置对安全隐患的产生影响
(4)视距、视区对驾驶任务的影响
鉴于视觉指示对驾驶任务的重要影响,因此需要通过科学的方法建立一套标志有效性的鉴别方法。在不同定位的道路上期望车速不同则对应驾驶人UFOV也各不相同,对交通控制设施、标志标线等设施的设置均需要在该范围之内。而为为减少驾驶人为识别标志而转头、眼动的次数,不同的标志之间必须要有合理的间隔。这些都是标志有效性相关的影响因素。
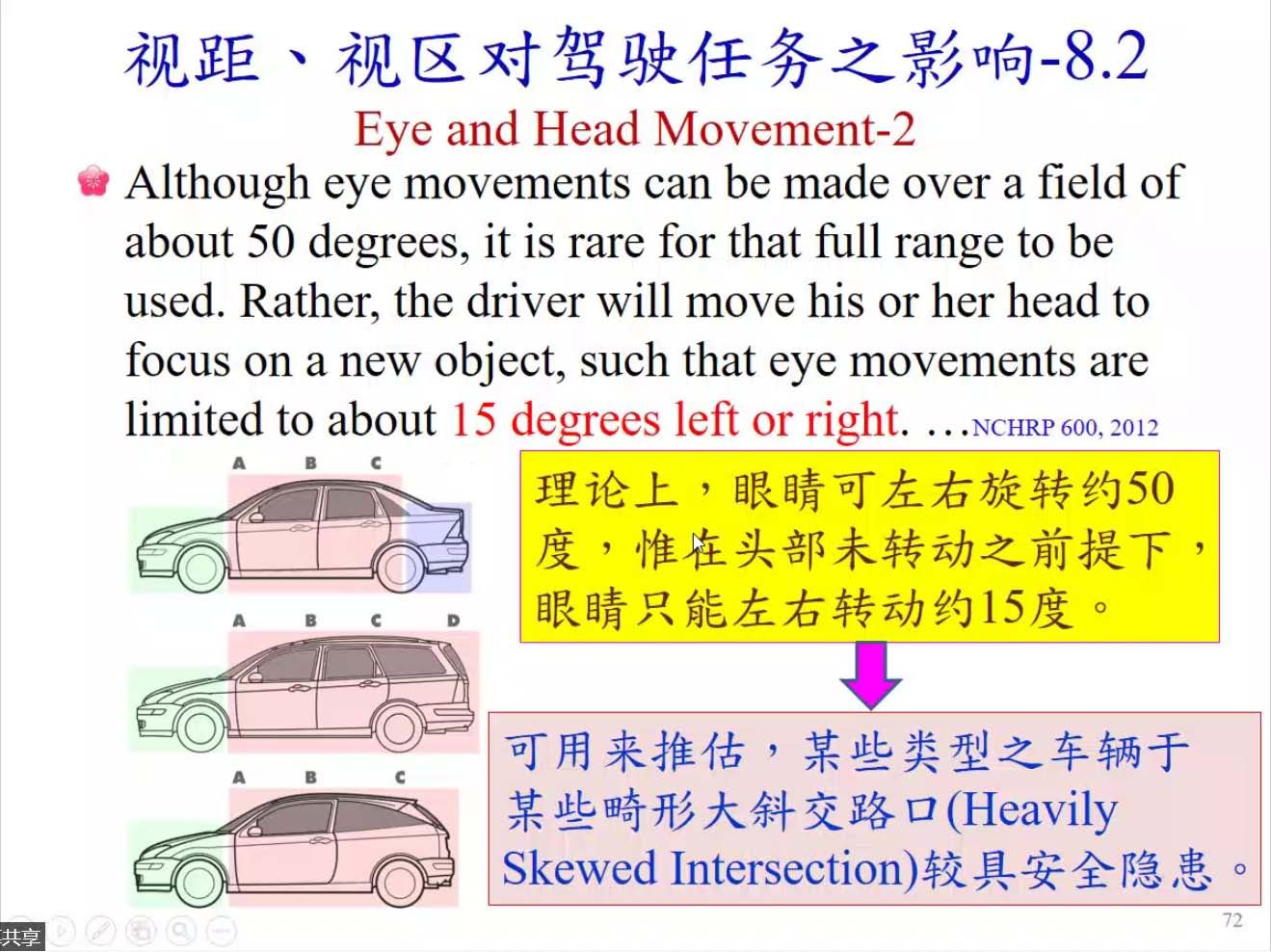
图 18 标志设置对驾驶人转头、眼动的影响
此外,路侧标志设置的不同间隔、不同位置还会影响车辆灯光的投射量。当车道数小于3时,路侧标志以置于右侧为原则。而对比立柱式标志与悬臂式标志,悬臂式标志能够减少车辆与标志间的视觉观测测角,增大灯光的投射量。而当车道数继续增加,内侧车道与右侧标志间的视觉观测角即增大,不利于驾驶人的识认,因此当车道数大于等于4时需深入检核内侧车道车辆与标志之间的视觉观测角,避免驾驶人频繁使用远光灯。
2.2. 视觉对驾驶人的影响
(1)视错觉
在道路设计与建设中,常见的视错觉包括5类,速度错觉、纵坡错觉、曲线错觉、距离错觉、弯坡错觉。在纵坡错觉中,长距离的下坡路段遇到另一坡度较缓的下坡,往往会因为错觉看成上坡;长距离下坡路段遇到另一缓升坡,往往会因为错觉看成险升坡,进而可能导致驾驶人在原本下坡的路段采取加速的操作,导致车辆超速,形成危险。因此需要通过道路安全审计(RSA),纠正视错觉带来的交通问题。

图 19 纵坡错觉案例
(2)单调催眠效应
长直道路、无信号、无标志、路侧环境单调的道路易造成驾驶人的分心。在这种驾驶条件下,驾驶人的驾驶负担较轻、驾驶行为容易长时间保持不变,导致驾驶人神经反应变得迟钝,提升驾驶风险。针对这类驾驶风险,世界各国并没有一致的规划设计要求,对其重视程度也不同。
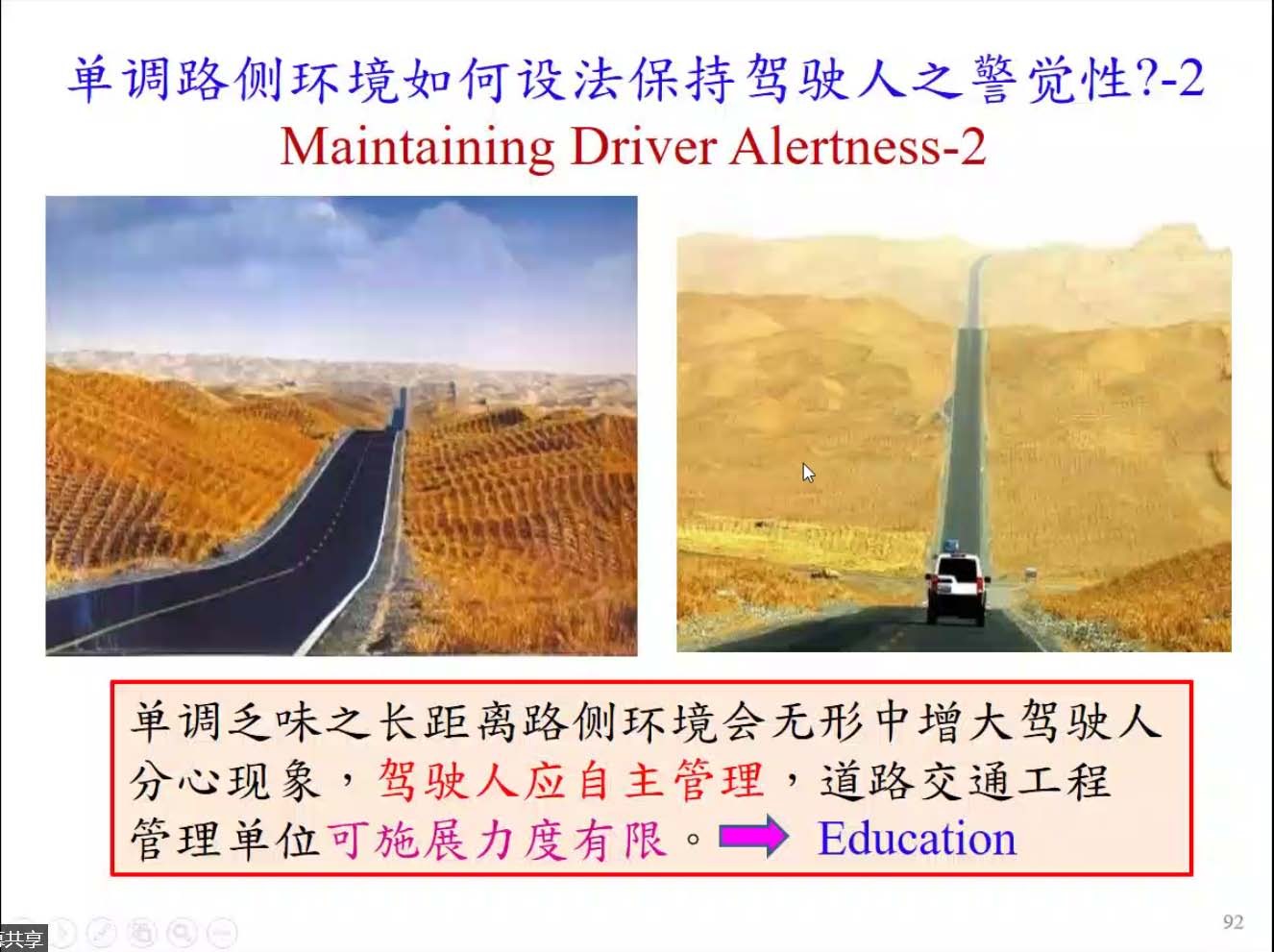
图 20 长直道路导致驾驶催眠现象案例
不仅仅单调的驾驶环境易导致风险,变化快速频繁的驾驶环境也同样会导致风险,走向了另一个极端。在夜间照明、反光设施的设置中,只需满足道路线形、路面条件的可视条件即可,过于密集的照明、反光设施不仅浪费资源,还会对驾驶人的视觉产生干扰,影响其正常驾驶。
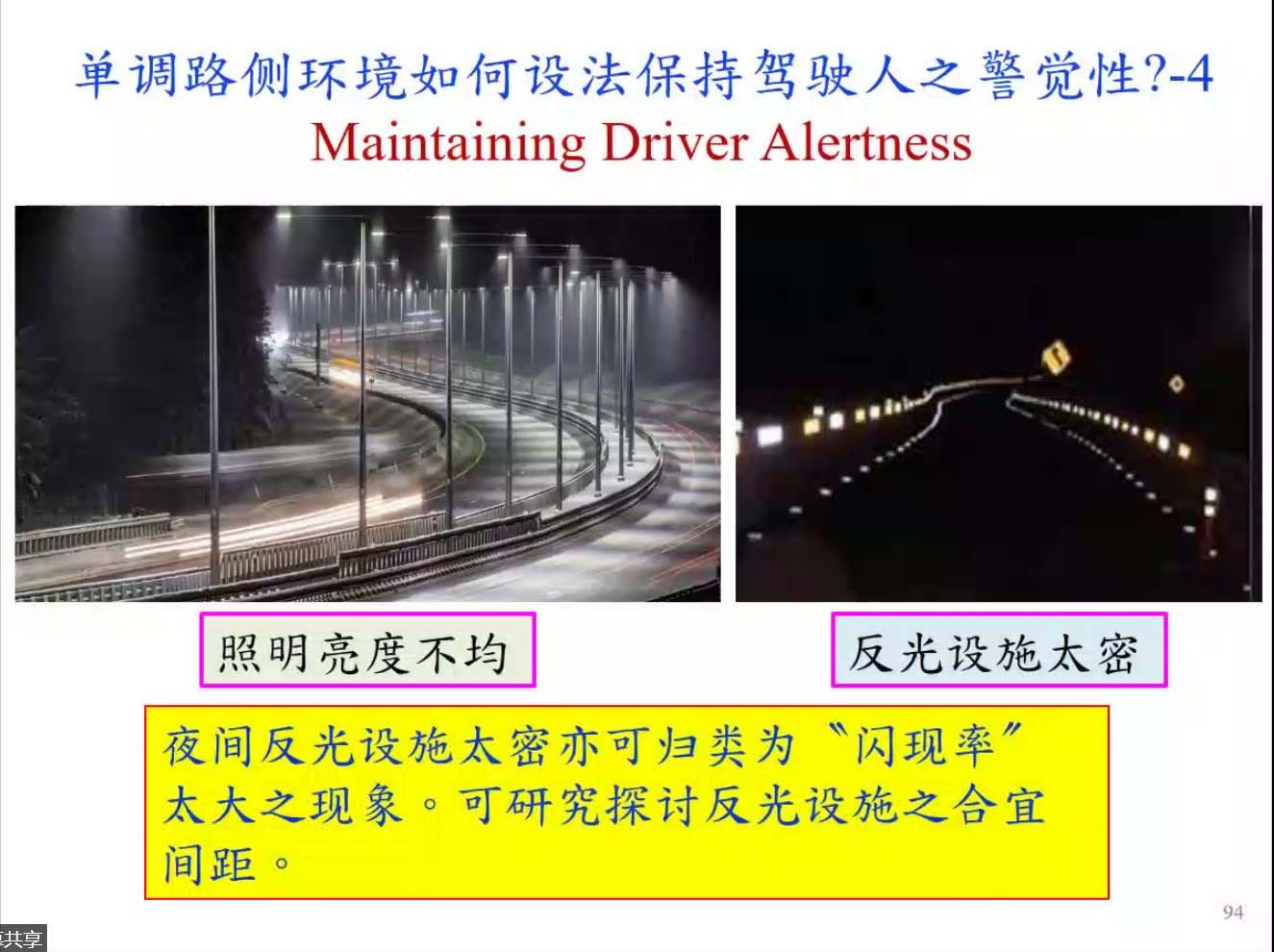
图 21 变化频繁的驾驶环境
3. 正后方车辆的跟车与变道行为
3.1. 正后方跟车
(1)跟车距离判断
绝大部分驾驶人根据其目视、主观感知进行距离的判断,而不善于利用标志标线辅助距离的判断。在实际操作中,可以依靠ITS车辆的传感设备、路侧标志,以及道路标线(六九线、四六线)进行距离的判定。
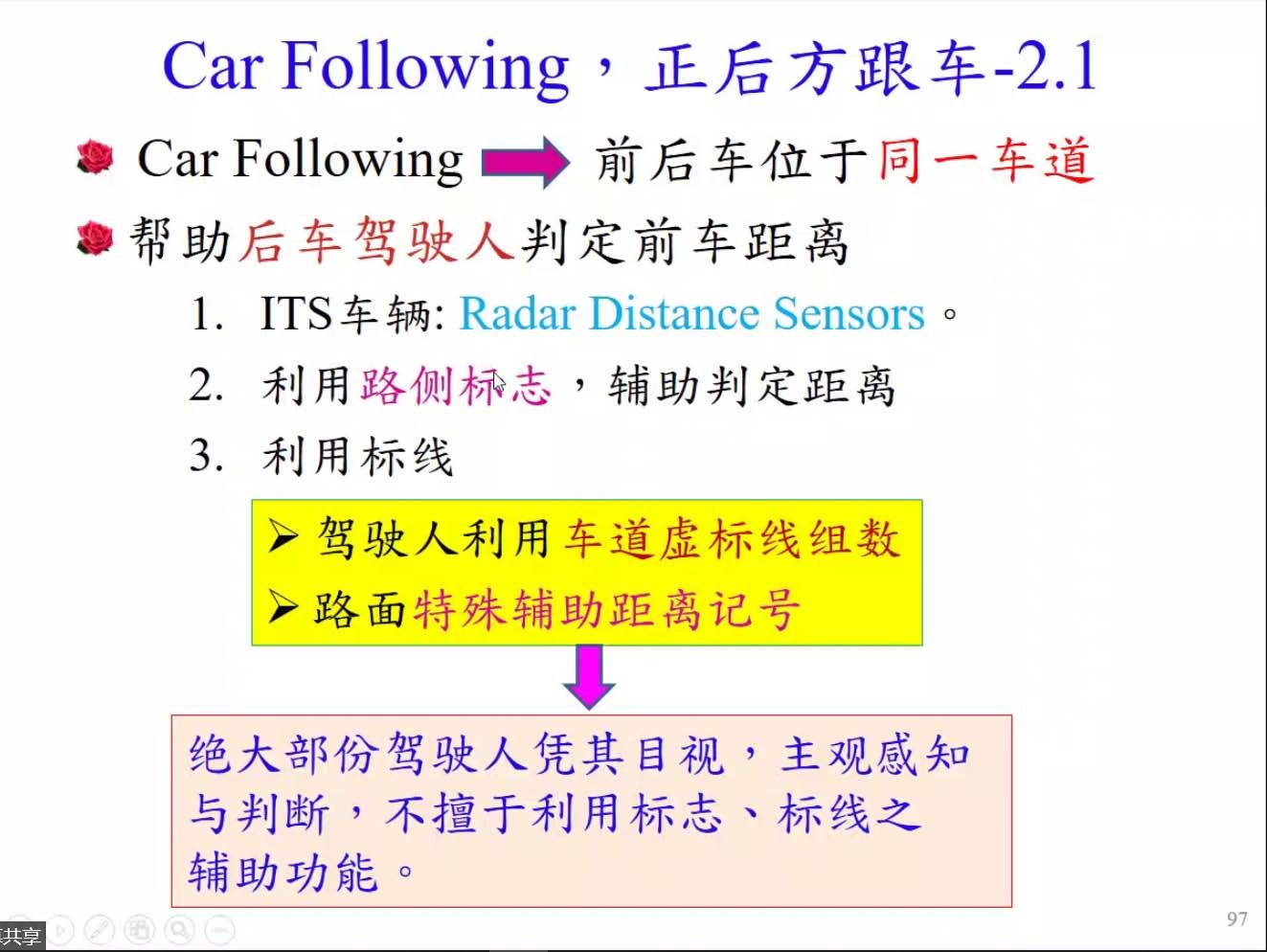
图 22 跟车距离的判断方法
(2)车道线对齐对跟车的影响
车道标线虚线不对齐会对驾驶人的视觉功能产生干扰,增加其驾驶负担,同时也会影响其对跟车距离的判断。
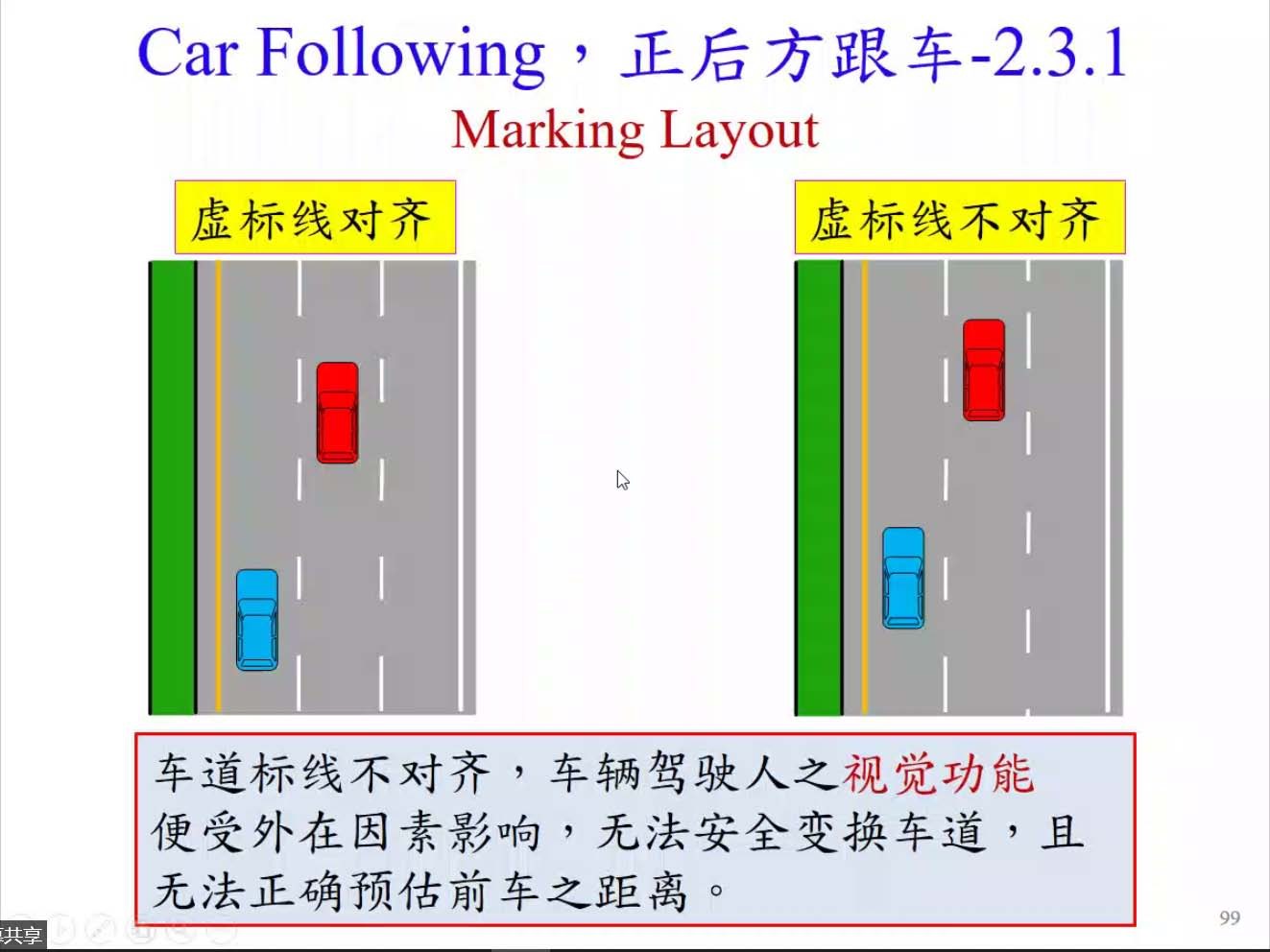
图 23 标线不对齐现象示意
3.2. 变道与超车
(1)蝴蝶效应
正常车流中受到小规模之干扰,而干扰本身所造成的影响持续扩散并放大,乃至影响道路横断面上之整体车流。这种现象的产生在于驾驶人对于交通状况的错误反应。因此必须对民众加以倡导,减少高峰时期强制变换车道的次数。
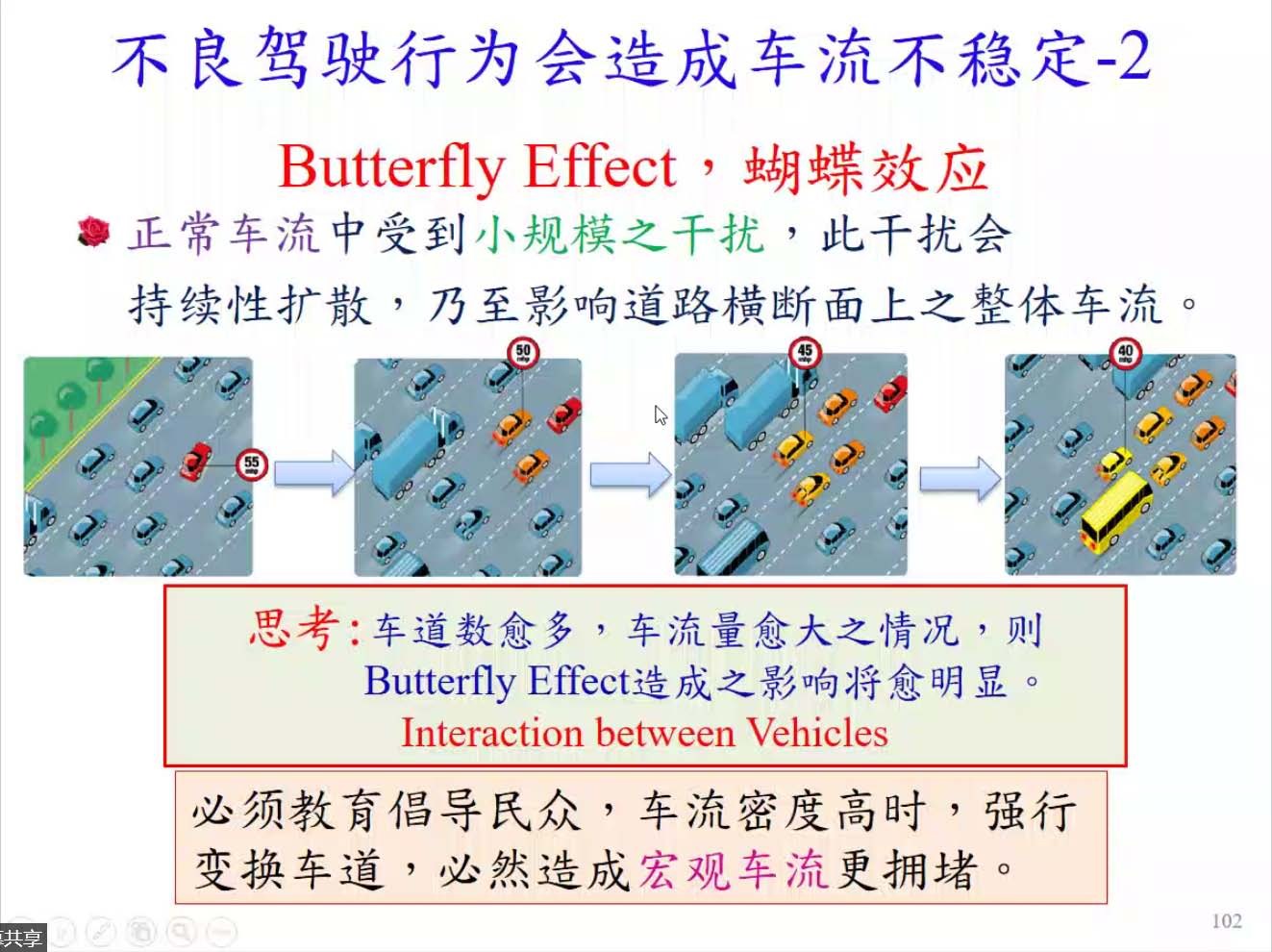
图 24 蝴蝶效应示意
(2)变道与保持车道
在面对单一车辆与多车辆时,变道与保持车道所面对的驾驶任务是不同的单一车辆所面对的驾驶任务是控制,而多车面临的驾驶任务除了控制还有Guidance,其重点除了自车的运动外新增了与其他车辆的互动。
(3)两种超车方式的差异
Overtaking是同向车辆行驶超车,Passing是借用对向车道进行超车的动作。

图 25 Overtaking与Passing两类超车
(4)变道中的Comfortable与Urgent
车辆的变道按照Acceptable Gap的不同可以划分为Comfortable lane-changing以及Urgent lane-changing两大类,而后者往往意味着危险。因此,在驾驶人进行变道操作之中,需要以Comfortable lane-changing为准则,不仅是驾驶舒适性的需要,更是安全的需要。
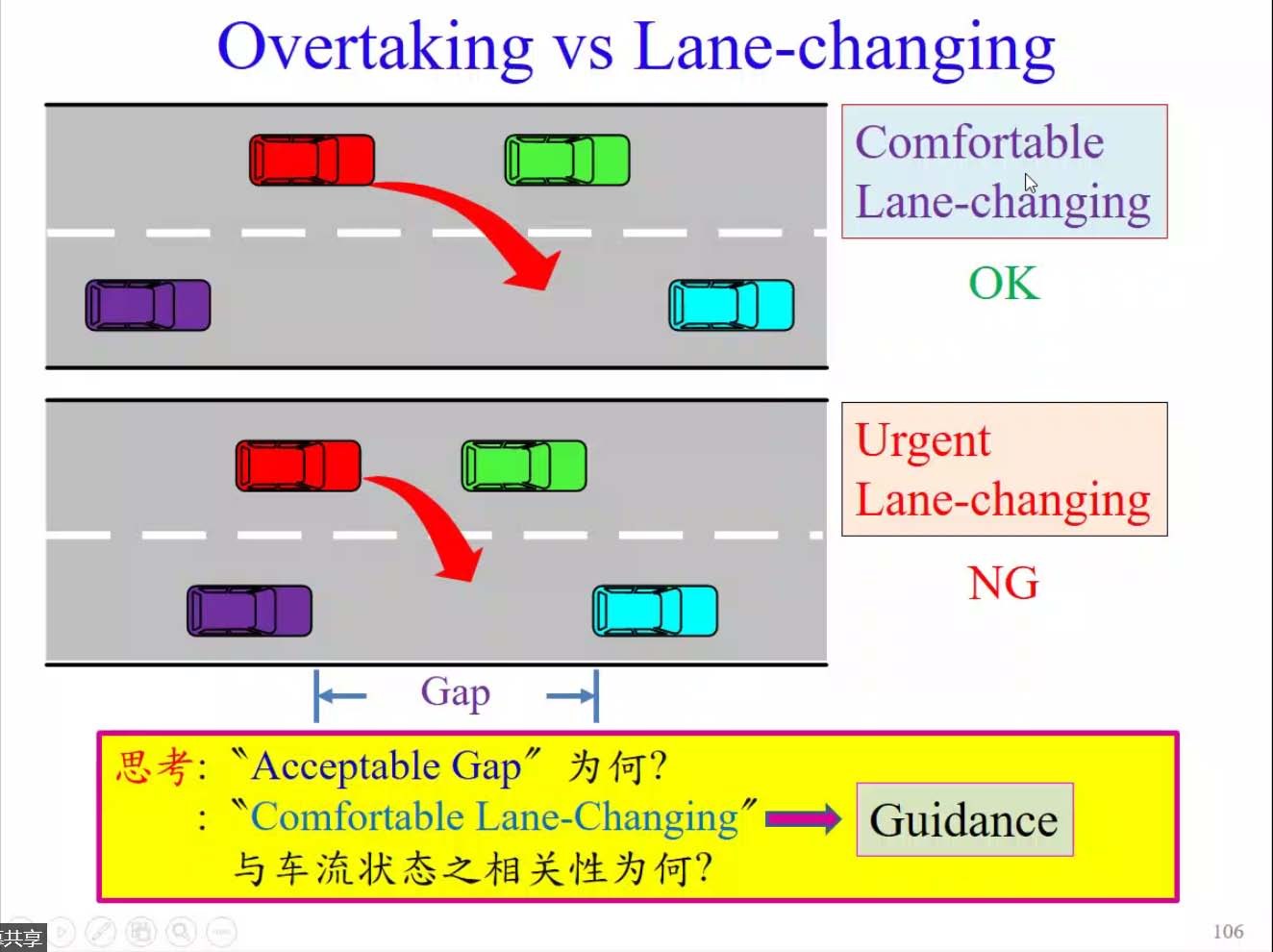
图 26 两类变道行为示意
(5)变道历程(Lane Change Duration, LCD)
LCD以车辆左前轮压车道线边缘视为变道的开始,以车辆完全进入另一车道并摆正车辆姿态视为变道结束。LCD是车辆事故鉴定的重要检核指标。
在对LCD的调研中,其值有不同程度的差异,在服务水平C、D的条件下,LCD在5-8s左右。考虑到LCD以及驾驶人的PRT,可以对道路交通标志牌设置的位置给出有价值的参考,为驾驶人预留出足够的时间进行反应。

图 27 不同研究中LCD的取值
(6)安全跟车距离(Safe Following Distance,SFD)
SFD的决定由车间时距决定,维持3-6秒的时间间距能够有效地保障跟车安全。现在新生产配备ITS设备的车辆能够有效测量车间间距与时距,有效辅助驾驶人保持安全的跟车距离。
(7)Gate的观念
Gate=Sight Distance+Sight Zone。在车辆的前后左右,共含有4个Gates。在4个Gates均未受其他车辆组当时,车辆能够在道路上自由移动。在紧急情况下,驾驶人至少需要保证两个Gates无其他车辆的阻挡,才能够获得避让的空间,并由此引申出“Defensive Driving”。因此,驾驶人应通过前方、侧方视野,以及后视镜及时检查车辆Gate的占用情况,以大限度保障车辆运行的安全。

图 28 Gate示意图
(8)Space Cushion
Space Cushion是Gate的一种进阶的形式。相比Gate,Space Cushion拥有6个方位,在新式汽车的上几乎都配备了各个方向的监测设备,对车辆的6个方位进行实时检测。配备了ITS设备的车辆能够通过传感器对多个方位的道路交通情况进行监测,辅助驾驶人进行道路交通运行状态的评估,使其合理选择驾驶方案。从这个角度讲,无论设备有多么先进,驾驶人仍然是安全出行的决定环节,因此在交通教育中需要培养驾驶人“自主独立意识”。
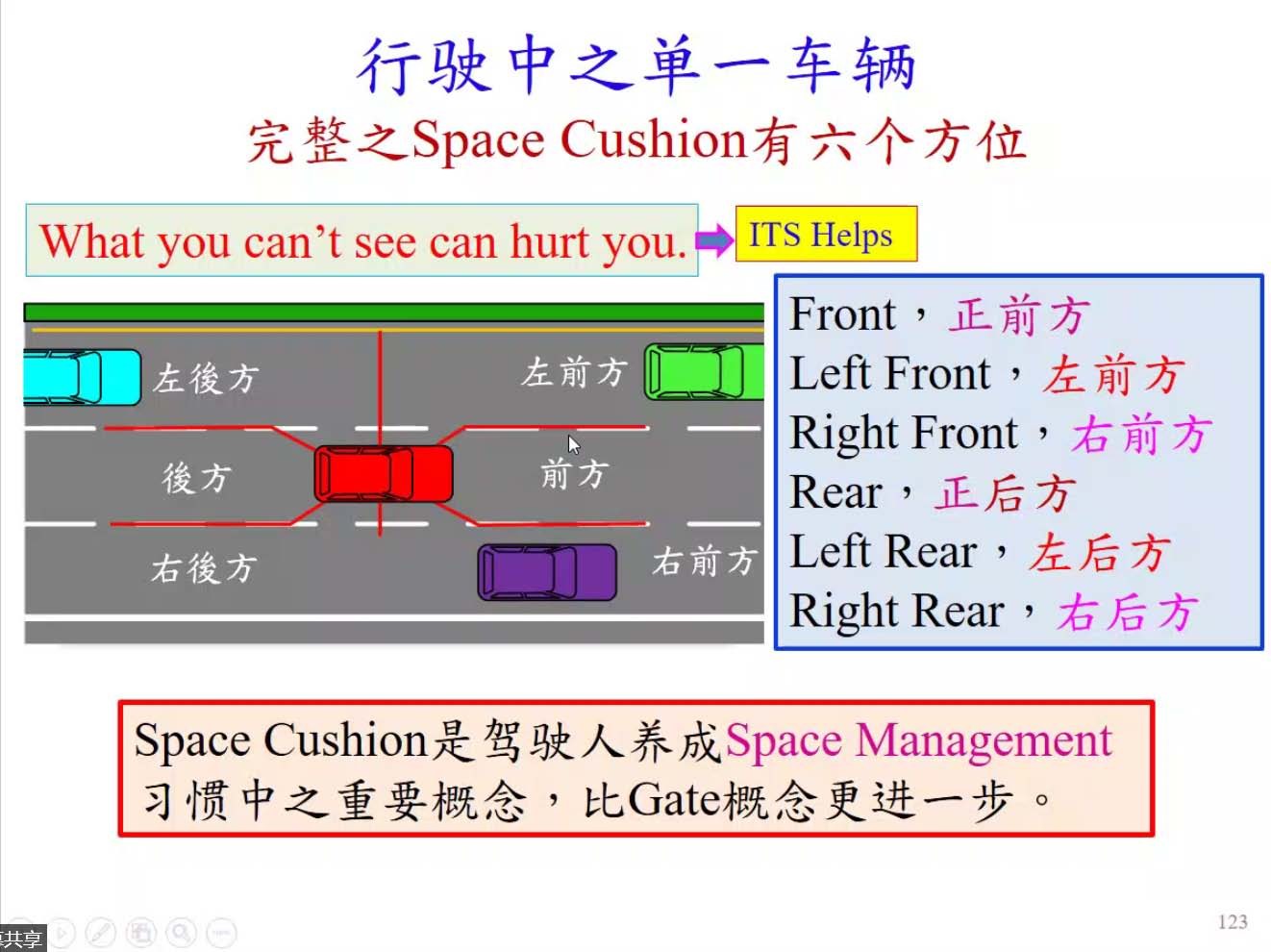
图 29 Space Cushion概念
(9)视线盲区
对车辆周边区域的感知与检测属于Space Management的范畴,而传统的后视镜在应用中存在视线盲区,尤其是大型车辆其视线盲区已经造成了多起事故。因此,需通过政府立法,要求大型车辆必须配备辅助检测设备,补充视线盲区的缺陷,改善车辆安全问题。同时,虽然科技设备能够辅助视线盲区问题的改善,但驾驶人仍需要具有盲区安全的意识,如此才能保持车辆行驶的安全性。

图 30 车辆视线盲区问题
3.3. 直线段变道的三个阶段
整个直线段变道的阶段可以分为三个阶段:决策段、预备段、执行段。

图 31 直线段变道三阶段

图 32 直线段变道不同阶段对应的驾驶任务、驾驶人影响
(1)决策段
其中决策段要求驾驶人必须有明确的认知才能够变换车道。当驾驶人对变道具有了明确的认知之后需尽快变道,认知停留的时间越长,安全隐患越突出。车辆高速行驶的条件下变道失败常伴随着车辆的紧急转向,易导致车辆的失控、甚至翻覆。而常见的变道失败即低估了变道时间。
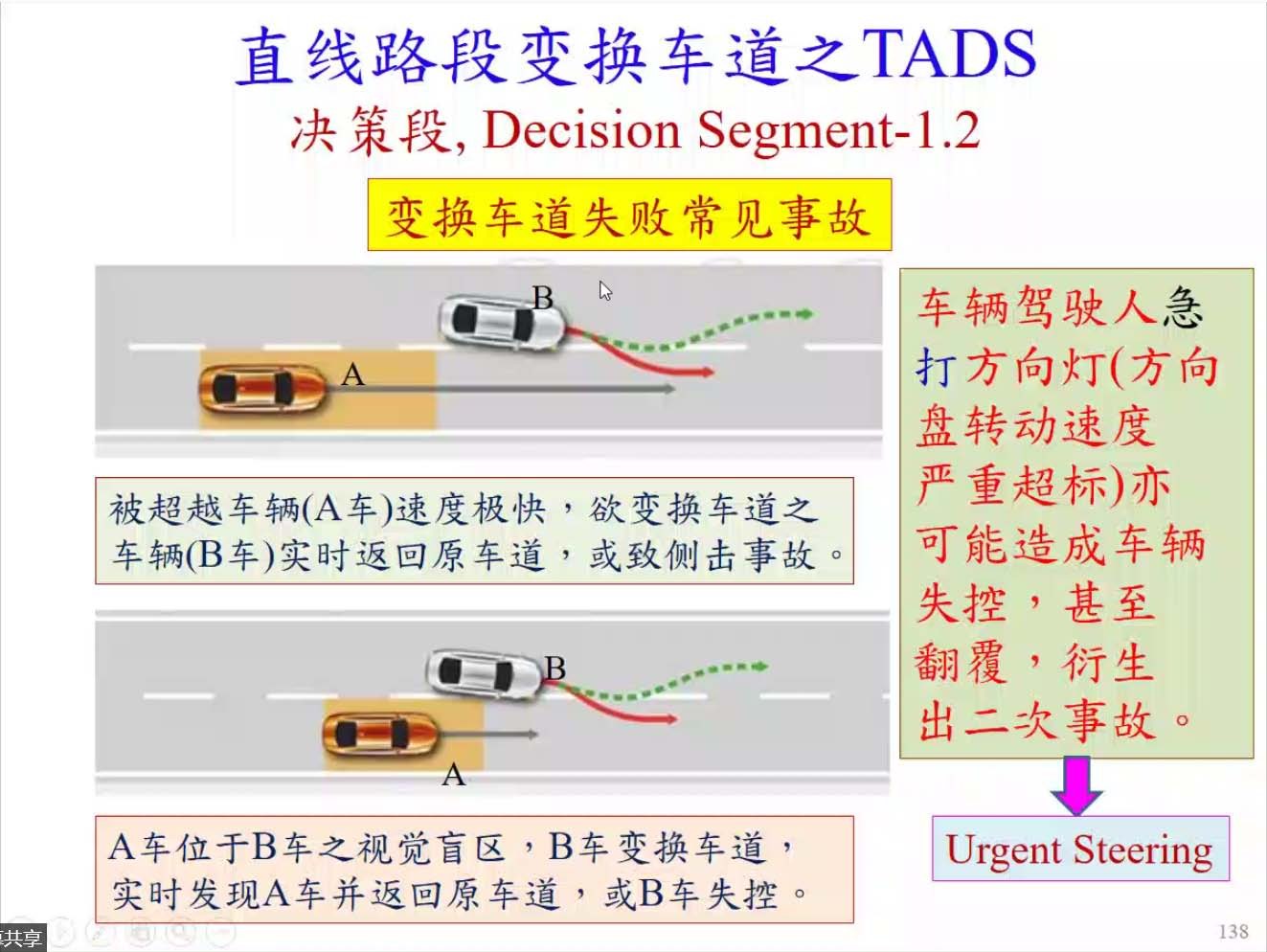
图 33 决策段过程
(2)预备段
视觉与方向盘的掌控是预备段的重点,在预备段需要做到,1)审视前方状况,确认车辆处于车道中央,2)于原车道中与其他车辆保持安全间距,3)与变道目标车道中的车辆保持安全距离,4)打转向灯,5)查看后视镜,注意车辆周围情况。总的来说,在变道中需要持续观测、监测邻侧。
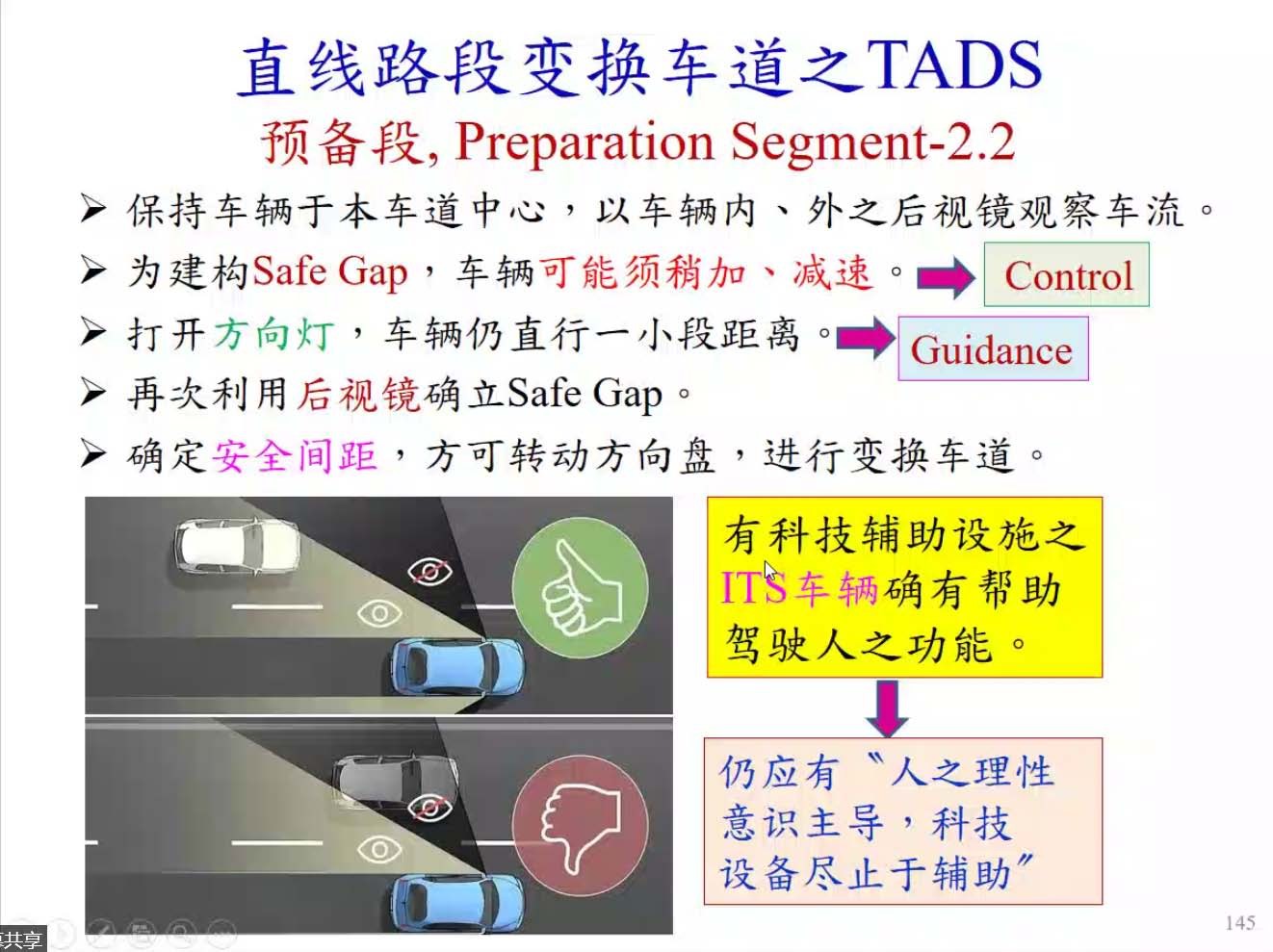
图 34 预备段过程
(3)执行段
执行段中,车辆变道的安全性重点在于“变道偏角”。偏角太小会导致车辆长时间跨线行驶,而偏角过大若车辆此时以较高的速度行驶,则会造成紧急变道的情况发生,造成较大的行驶风险。因此,在进行变道事故的分析中,一个重要的点就是检核其变道偏角是否过大。
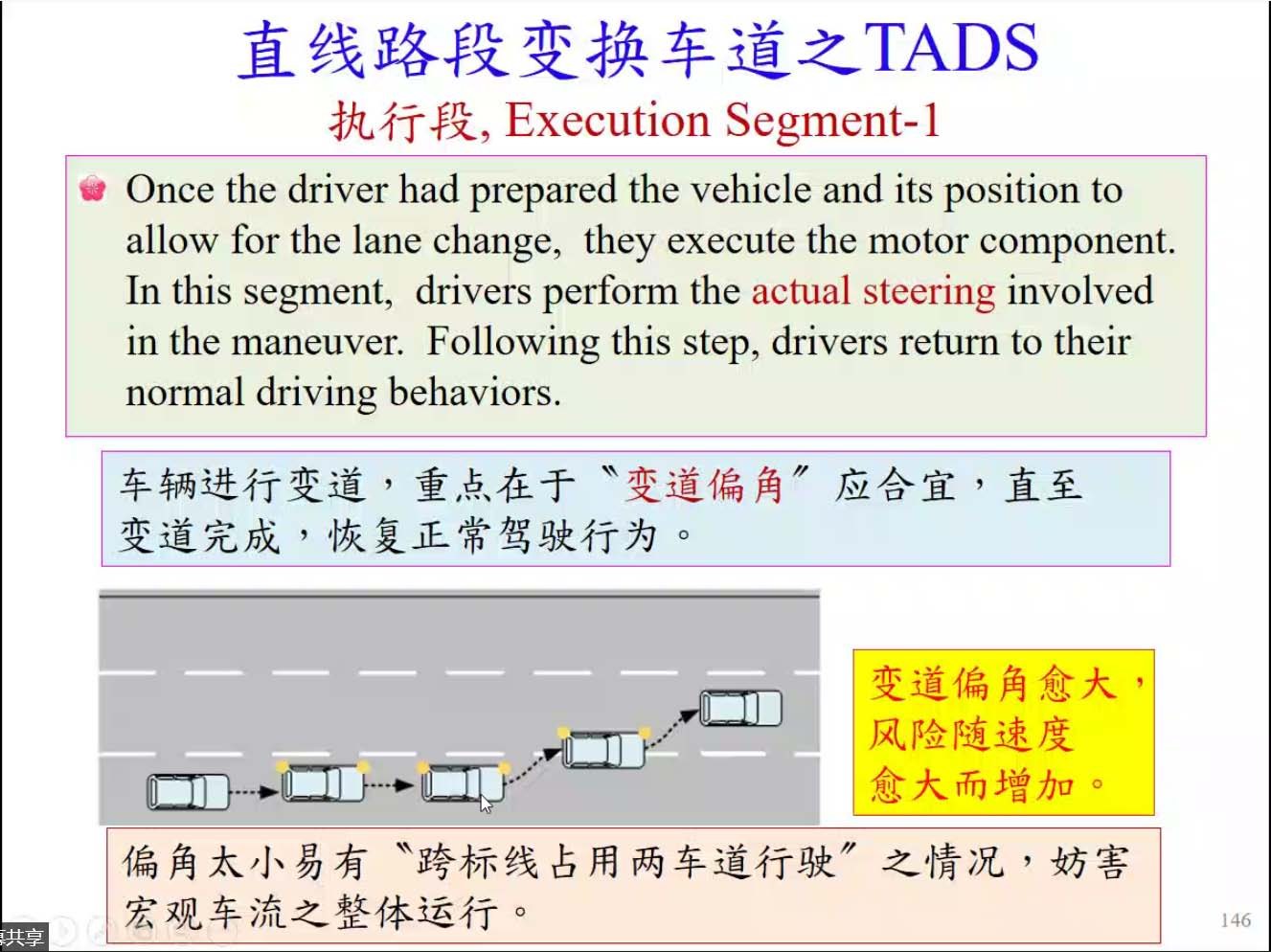
图 35 执行段变道
(4)安全变道五步骤
安全变道的五步骤包括:1)驾驶人确认安全间距,2)视线盲区检核,打转向灯,3)再次检查,4)渐进变道,5)变道完成,关闭转向灯。当变道需要跨越多条车道时,需按顺序一条一条车道变道,同时注意与各车道上车辆保持安全间距,且不可在道路上斜穿。

图 36 安全变道关键要点
【“同路人”交通安全技术论坛简介】
“同路人”交通安全技术论坛由同济大学、公安部交通管理科学研究所、交通部公路科学研究院共同发起,依托交通安全学科创新引智基地(“111项目”)、道路与交通工程教育部重点实验室、道路交通安全与环境教育部工程研究中心、交通安全国际合作联合实验室、交通安全研究信息共享平台,就中国道路交通安全的重点问题展开深入讨论,推动国家道路交通安全科研水平的提升和应用技术深化。
从2016年开始,“同路人”交通安全技术论坛已经开展了如下主题的研讨:美国《统一交通控制设施手册》(2016年9月)、高速公路安全重点问题(2017年8月)、基于行为分析的营运驾驶人安全教育(2017年9月)、道路安全设计(2017年10月)、事故多发道路判别与改善(2018年8月)、速度管理(2019年5月)、人因与道路交通安全(2020年6-7月)、道路路网结构合理性与整改思维(2020年10月)、道路路网结构之“接入”规划设计理念(2020年11月)、路权之工程、法律意涵与实务应用(2020年12月)、统一交通工程控制手册(2021年6-7月)。
本次系列论坛主办单位为同济大学、公安部交通管理科学研究所、交通运输部公路科学研究院、“一带一路”国际交通联盟(BRITA)、上海市交通工程学会、上海市交通委员会科学技术委员会、中国公路学报、中国智能交通协会交通安全专委会。将邀请逢甲大学徐耀赐教授就“由驾驶任务进阶至道路交通工程设计”进行讲座,活动由交通安全学科创新引智基地(“111项目”)资助。