新闻来源:英特尔中国研究院
前言:作为当前的科研热点之一,自动驾驶将对人类的工作与生活方式、城市面貌、甚至社会组织形态带来巨大的改变。产学研的合作、资本的投入以及政府的支持,已经形成一股合力,推动自动驾驶技术加速发展与落地。然而,自动驾驶是一个复杂的系统工程,从整车研发、车路协同、安全测试再到行业标准与法律法规,仍有许多问题尚待解决。因此,英特尔中国研究院于2018年发起成立了智能网联汽车大学合作研究中心,旨在携手国内相关领域的一流研究团队开展深入合作,共同推动自动驾驶技术在中国的产业化进程。
近日,英特尔智能网联汽车大学合作研究中心(ICRI-IACV)第二次研讨会在同济大学成功举办。来自英特尔的技术专家与清华大学、中科院自动化所、同济大学、交通运输部公路科学研究院、南方科技大学的研究团队,以及产业界的特邀嘉宾们齐聚一堂,分享研究成果与行业洞察,共话智能网联汽车的未来。参与此次研讨会的嘉宾分享了各自团队的最新成果,以下为部分精彩内容分享。

英特尔智能网联汽车大学合作研究中心第二次研讨会参会人员合影
英特尔
英特尔中国研究院宋继强院长为研讨会致开幕词,并介绍了中国智能网联汽车道路开放测试地点以及参与测试的企业的分布情况。宋院长认为,智能网联汽车的研究是以数据为中心的,包括数据的采集分析处理和交换传输,安全性问题则是另外一个焦点。中国是自动驾驶汽车发展的先锋,应抓住这一机遇,大力开展智能网联汽车方面的研究。

英特尔中国研究院院长宋继强
英特尔研究院副总裁兼系统与软件实验室总监Pranav H. Mehta分享了英特尔研究院在自动驾驶领域的战略和布局。作为ICRI-IACV的主席,他对各研究团队的进展非常满意,并认为自动驾驶会在中国率先落地,因为中国民众对自动驾驶的态度更加积极。

英特尔研究院副总裁兼系统与软件实验室总监Pranav H. Mehta
英特尔中国研究院智能驾驶实验室总监吴向斌介绍了如何保障自动驾驶车辆的安全,重点讲解了责任安全敏感模型RSS(Responsibility Sensitive Safety)的架构和内涵。RSS模型一经推出就获得了业界的关注和响应,进一步推动了自动驾驶技术的发展和落地。

英特尔中国研究院智能驾驶实验室总监吴向斌
英特尔欧洲实验室首席研究员Kay-Ulrich Scholl博士介绍了用于自动驾驶研究的CARLA开源模拟器,以及如何使用基于模型的系统工程方法和仿真开发自动驾驶软件栈。
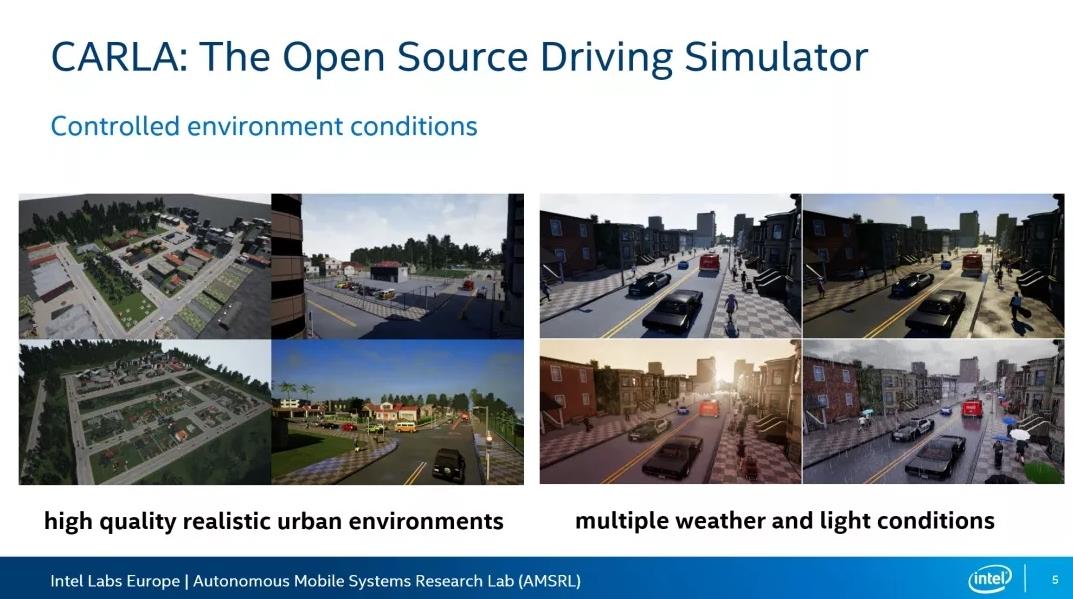
CARLA开源模拟器支持不同的环境与条件
CARLA是英特尔研究院支持开发的开源项目,是英特尔对自动驾驶研究社区的一份贡献。CARLA模拟器基于UE4 物理引擎开发,功能非常强大。它自带多个虚拟城市地图,能模拟输出摄像头、激光雷达、卫星定位等多种传感器数据,并提供视觉深度、车辆速度、3D对象检测、语义分割、碰撞与违规信息的参考真值(Ground Truth)。此外,它还具有场景仿真的能力,能与ROS协同仿真。CARLA给用户提供可扩展的Python API接口,易于上手使用。(关于CARLA的更多详细信息,请登陆 http://carla.org)
特别提示,CARLA自动驾驶挑战赛已于4月14日开赛,共分四个竞赛单元,每个单元的第一名将获得5000美金的现金奖励。欢迎报名参赛!(https://carlachallenge.org/)
同济大学
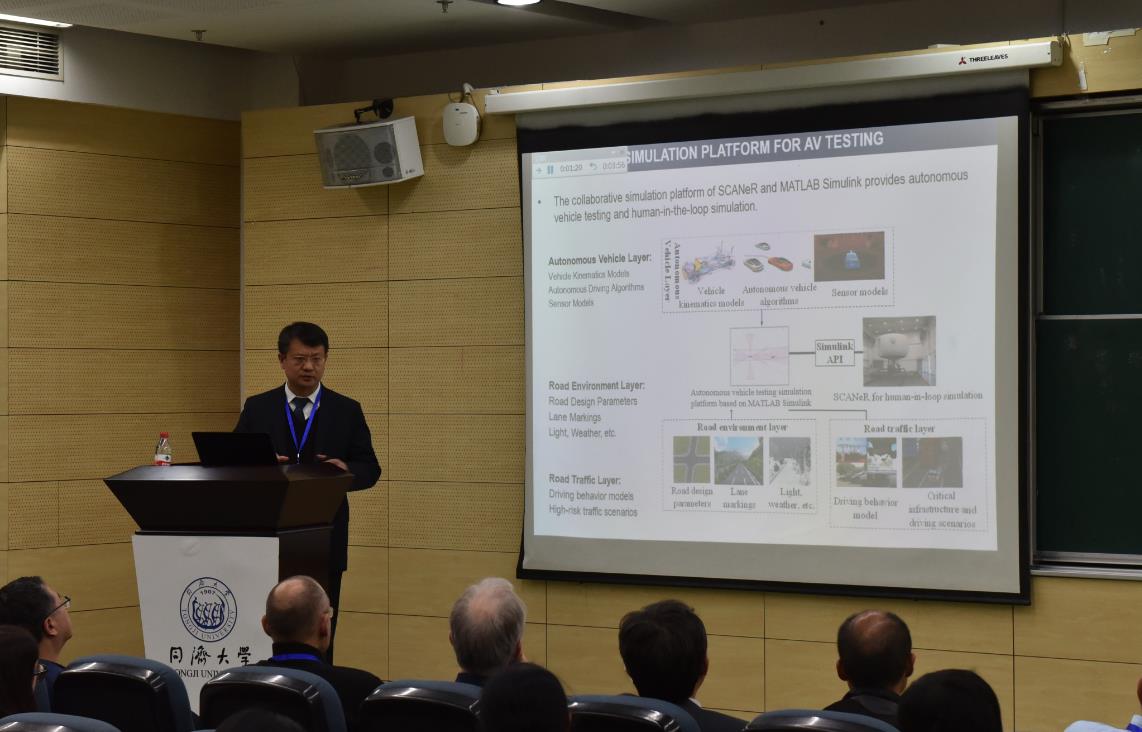
同济大学交通运输工程学院的王雪松教授与英特尔合作开展了“道路自动驾驶适驾性评估与改善”课题,其研究团队通过仿真模拟测试来评估和改善道路自动驾驶适驾性,对自动驾驶技术的落地有着非常重要的意义。
该团队使用MATLAB Simulink和SCANeR两种软件搭建了协同仿真平台。Simulink负责运行传感器模型、自动驾驶算法以及车辆运动模型,用以控制自动驾驶车辆的运动。而道路环境、周边车辆以及驾驶员在环测试由SCANeR软件负责。自动驾驶车辆的状态及操控信息会在这两个软件间实时交换。
基于这套仿真系统,该团队将RSS模型嵌入传统的自适应巡航(ACC: Adaptive Cruise Control)算法进行模拟仿真并与原始仿真结果进行对比,产生了不少有趣的发现。比如有RSS的ACC系统会更早采取减速措施以规避可能的碰撞危险,从而提升系统安全性,但控制输出的线性度还有提升空间。
作为本次研讨会的东道主,同济大学展示了该校道路与交通工程教育部重点实验室,以及该实验室的道路与驾驶行为研究利器——8自由度驾驶模拟器。
同济大学交通运输工程学院王雪松教授
清华大学
清华大学汽车工程系的李克强教授介绍了该校智能汽车团队在网联多车协同决策与控制领域的最新进展。在未来由智能网联汽车组成的智能交通系统中,多车的网联协同驾驶将成为关键技术。
智能交通系统的决策与控制包含两个主要场景:路段的车辆队列控制和交叉路口的车群控制。在路段行驶时,车辆编队能灵活调整跟车距离,提高车辆对突发情况的响应速度,减少风阻等,因此可以极大缓解交通拥堵,并提升安全性和燃油经济性。在有信号灯的交叉路口,通过对车辆和信号灯控制的解耦和协同优化,能够显著提升交通效率;在无信号灯的交叉路口,通过基于虚拟队列的多车协同控制方法,可以解决交叉路口车辆冲突的难题并提升交通效率、减少燃油消耗;在包含多个连续有信号灯的交叉路口的主干道上,可以根据信号灯的状态计算出各车最优的通行速度,全局优化车辆运动和交通信号配时,从而实现节能驾驶。
实际道路测试结果显示,网联协同决策控制能让车辆平均等待时间减少约四分之一,平均油耗下降约五分之一,而平均通行时间不变,说明团队提出的方法可以在保证通行效率的前提下,提升燃油经济性。
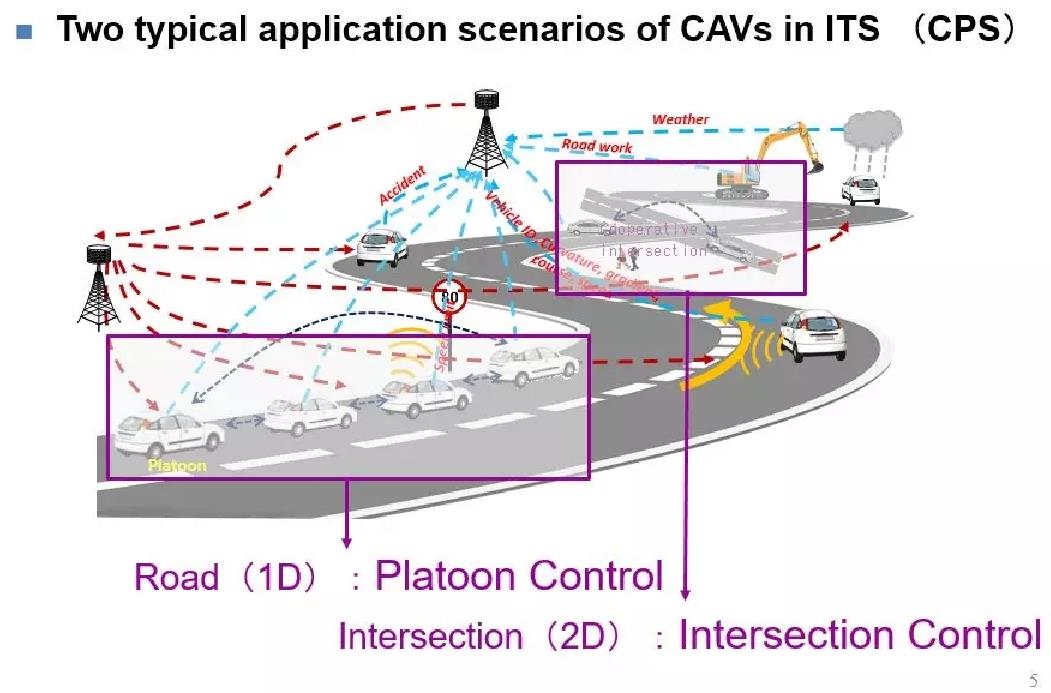
智能网联汽车组成的交通系统中典型的应用场景:车群控制
清华大学电子工程系的牛志升教授则着力于研究适应自动驾驶的、情境感知的可靠低延时V2X通信网络,探索如何结合应用需求为智能网联汽车间的V2X通信提供高可靠、低延迟的支持。牛教授介绍了最新的研究成果,比如通过对深度神经网络的切分进行多车联合感知,以及基于Service Function Chain (SFC)的可重配置网络。
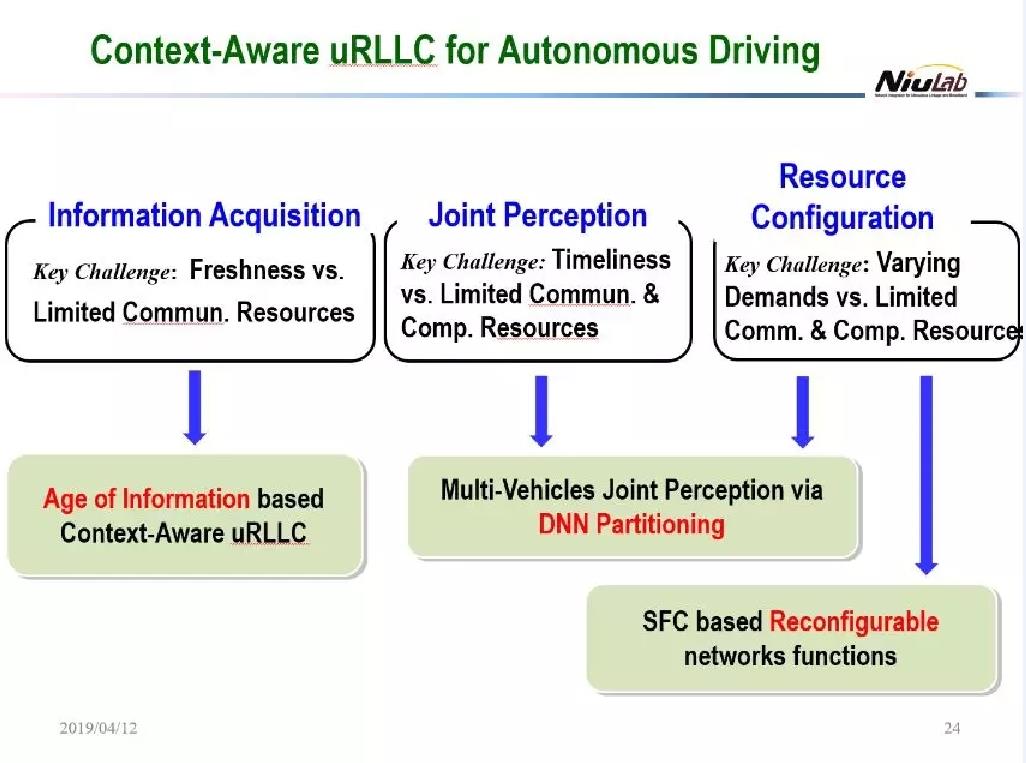
自动驾驶场景中基于上下文感知的高可靠低延迟通信
公安部交通管理科学研究所
公安部交通管理科学研究所在自动驾驶汽车的驾驶能力测试方面有着丰富的实践经验。俞春俊副所长分享了对自动驾驶汽车驾驶能力测评的实践与思考。
交科所主要从以下五个方面测试自动驾驶汽车的驾驶能力,包括:
•交通控制设施的检测及响应能力
•测试自动驾驶汽车对前方动静态目标识别与响应能力
•遵守规则行车能力
•安全接管应急制动能力
•网联通信能力
从测试情况看,当前自动驾驶车辆可以实现在高精度地图辅助的情况下接管车辆的操作,实现特定区域内的中低速自动驾驶。各项测试项目中,从传统ADAS升级来的功能项通过率较高。例如前方车辆动静态识别、跟车行驶类的测试项目一次通过率占比超过80%。
交通环境感知能力尚存缺陷,在配备了激光雷达、毫米波雷达、摄像头、高精定位模块等精密传感装置的情况下,仍然无法实现可以满足实际要求的感知成功率,从而制约了整个自动驾驶系统的水平。测试发现,自动驾驶车辆对动态、较小静态障碍物识别率偏低。例如,对高度小于50cm的低小障碍物(三角警告牌、锥桶)、车道内动态行人的识别率大约只有30%。

自动驾驶车辆安全测评体系
俞所长认为目前的测试方式和方法存在三个需要思考和改进的方面:
一是缺乏客观评价自动驾驶汽车的规范标准进行支撑。现有的自动驾驶汽车相关规范多为指南,缺少有具体测试数据支撑的操作规程。
二是虚拟测试的有效测试方法尚不明晰,柔性测试工具链和加速测试技术尚不完善。对于在现实生活中无法高度还原的危险场景和边界场景,利用软件测试/虚拟测试等方式,能够提高测试效率,还能实现当前的场地测试条件下难以满足的实测需求。
三是测试组织方式待优化。在封闭测试中,一般以单项测试为主,通过反复测试来验证自动驾驶系统的稳定性和准确性,测试周期较长,缺乏多项驾驶能力/场景用例综合测试机制来提高测试的真实性,并缩短测试周期。
中国科学院自动化研究所
中科院自动化研究所复杂系统管理与控制国家重点实验室主任王飞跃教授的平行驾驶理念与CPSS (Cyber-Physical-Social Systems) 研究框架,从理论到实践都是独树一帜的。面向CPSS的平行驾驶通过对物理车辆和真实道路建模,让物理的汽车和软件定义的汽车在真实世界和人工世界平行学习和控制,在物理信号之外还引入了驾驶员的社会情感信号和人机因素。其团队关于平行驾驶智能测试的文章 “Parallel testing of vehicle intelligence via virtual-real interaction”,最近作为 “Focus Article”在今年的Science Robotics发表,得到了广泛关注。
该研究团队还将平行驾驶与英特尔的RSS模型相结合,所获得的实验分析结果对RSS模型的进一步完善与推广应用有着非常积极的意义。
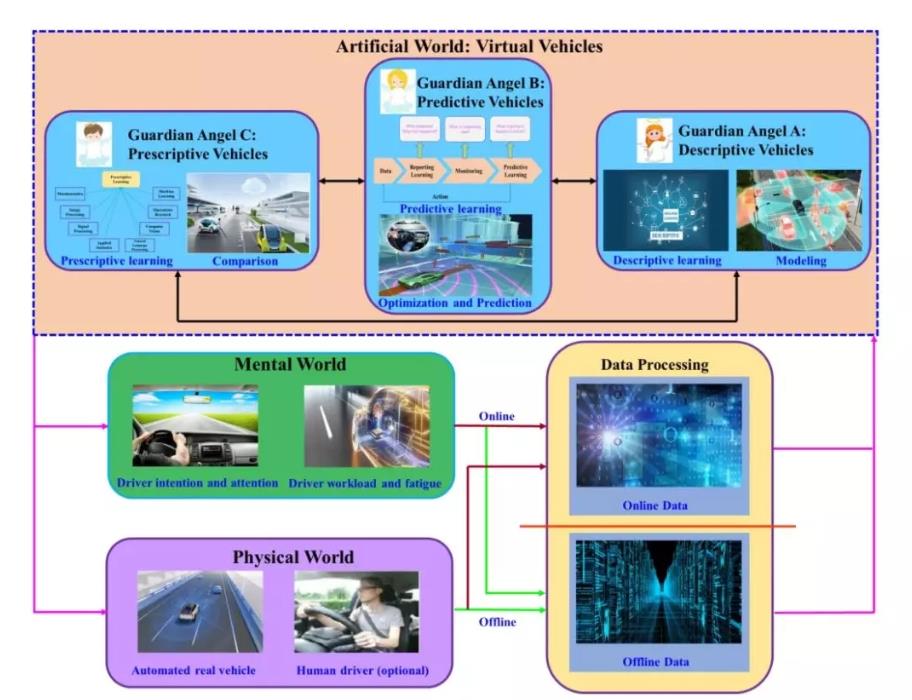
平行驾驶中的数字“四胞胎”系统
交通运输部公路科学研究院
交通运输部公路科学研究院首席科学家王笑京教授介绍了国家在智能网联汽车政策法规及标准制定方面的进展,以及场地测试和智能高速公路研究方面的情况。王教授及其团队基于RSS模型开展了自动驾驶安全与安保研究,对CARLA仿真器做了详细调研并给出了很高的评价,后期将在CARLA上开展建模仿真工作。

中国自动驾驶/智能交通相关标准总览
南方科技大学
南方科技大学郝祁教授介绍了为自动驾驶车辆构建的开放数据集。不同于自动驾驶领域已有的数据集,该研究团队数据集的样本将会通过实际运行的公共交通车辆(包括出租车、公交车)完成采集,因此样本量大,且具有很好的多样性。这对自动驾驶技术的研发和验证具有很高的参考价值。
该团队设计的多传感器承载系统包括传感器的校准与同步已经基本完成。测试车也在最初选择的深圳的两条主干道进行了数据的预采集和预标注。这套采集系统不久将首先在公交车上安装调试,采集工作也会很快展开。

南科大郝教授团队里参与数据收集的各类车辆
上海汽车城
上海汽车城的林瑜博士介绍了上海智能网联汽车创新中心的国家智能网联汽车(ICV)上海试点示范区。封闭测试区(F-Zone)面向自动驾驶、V2X技术与标准测试研究,服务于技术研发、产品开发及车辆进入公共道路前的各种安全性测试。与会嘉宾这次也应邀实地参观了封闭测试区,并试乘了园区内采用自动驾驶技术运行的自动巴士。

国家智能网联汽车(上海)试点示范区内的路口一角